研究紹介
新原理に基づくアクチュエータ・センサ技術
触覚・力覚を介したインタラクション技術
環境エネルギを活用したロボット機構
などが,最近の中心的な話題です.
それ以外にも,メカトロニクス・人・環境をキーワードに幅広く研究を行っています.
Youtubeチャンネル
一部の研究については,Youtubeでも紹介しています.新原理アクチュエータ(静電モータ)
従来の電磁モータでは実現困難な新しい「動き」を実現することを目標に,新たな原理によるアクチュエータの研究開発を行っています.静電気力,熱,振動などの活用を研究しており,特に,静電気力を用いた静電モータ(静電アクチュエータ)については,多くの実績を有しています.ここでは,そうした静電モータ/静電アクチュエータの事例を紹介します.
一般に静電気力はマイクロシステムでの活用例が多いですが,本研究室ではcmオーダのマクロな領域における静電気力応用を研究しています.静電気力を上手に活用すると,極薄のモータや,透明なアクチュエータ,あるいは,軽量高出力な人工筋肉などが実現できます.そうしたユニークなアクチュエータを活用した新しいメカトロニクスシステムを提案・研究しています.
下の写真は,フレキシブルプリント回路基板を積層して製作される高出力リニアモータです.写真にあるように,柔軟に変形可能であることから,ロボット用人工筋肉としての活用が期待できます.さらなる高出力を実現するため,駆動方式や製作方法の改善等について研究を進めています.このモータは同期モータであることから位置決め制御などにも適しているほか,MRIなどの強磁場内での駆動にも利用可能です.

下にあるビデオは,スクリーン印刷技術を活用して製作した透明平面静電アクチュエータです.透明な固定子電極上で,同じく透明な移動子電極を同期駆動で動かすことや,紙,プラスチックフィルム等を動かすことが可能です.
【透明静電アクチュエータによる紙のハンドリング】
こうした透明アクチュエータを液晶ディスプレイと統合することで,画面の上で映像に連動して物体が動く,全く新しいタイプのユーザインタフェースを実現することができます.これ以外にも,静電アクチュエータのインタラクション応用を幅広く研究しています.
触覚センシング
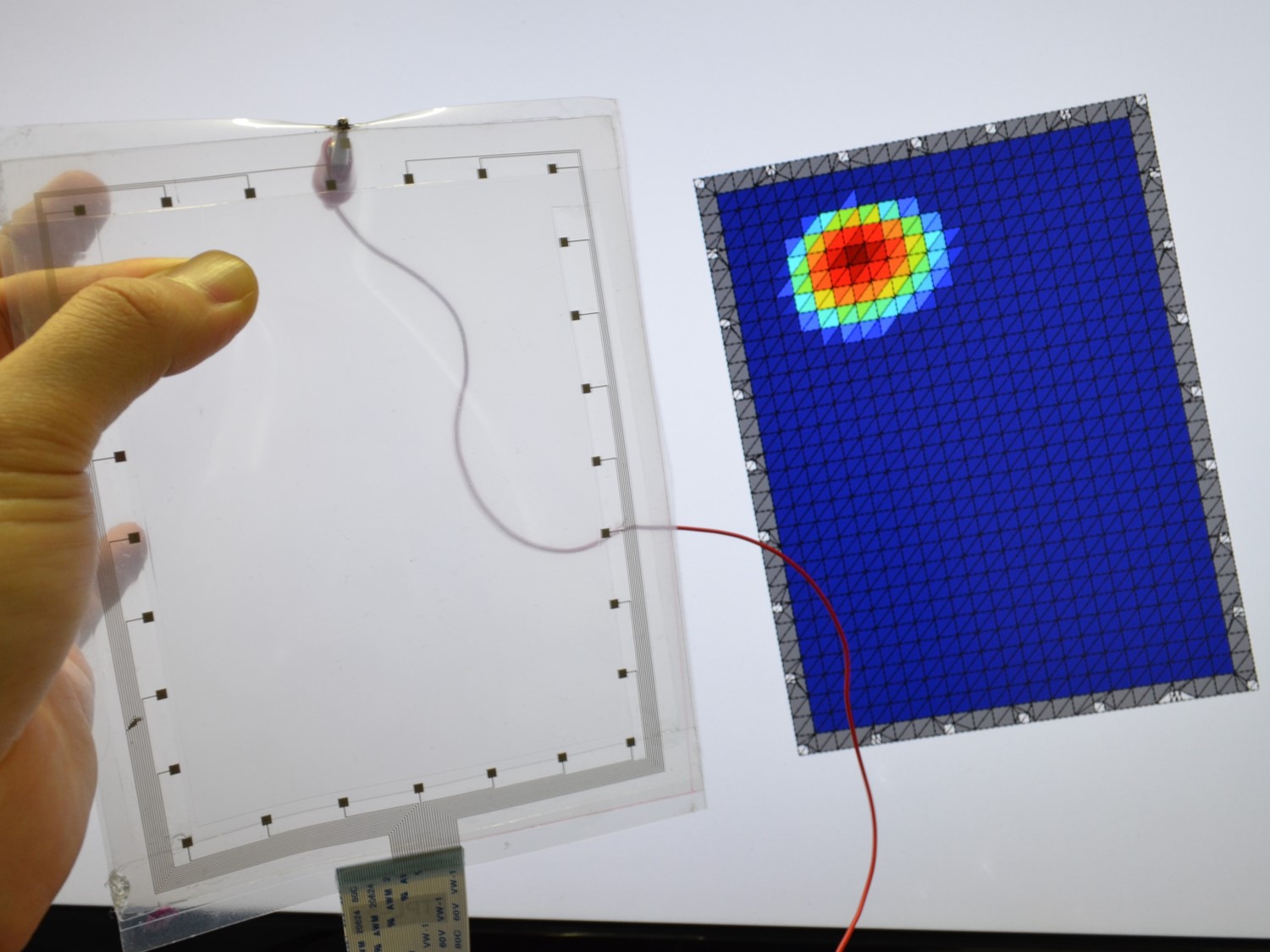
ロボットの触覚センシングや,新しいタッチインターフェースの実現のため,トモグラフィというイメージング手法を用いて簡便な装置で圧力分布を計測する技術を開発しています.従来は感圧材料が必要で設計の自由度に課題がありましたが,提案手法では電気を通す材料に電極を取り付けるだけで圧力分布が検出でき,様々な形状の物体に搭載したり,柔軟で透明な圧力分布センサの実現が期待されます.
機械としての触覚だけでなく,人の触覚や運動に関する新しいセンシング手法についても研究を行っています.筋骨格構造や血流などの様々な生体物理現象に基づいて間接的に検出することで,環境や身体と調和したアンビエントな生体計測手法を探求しています.
力覚・触覚提示
遠隔操作やバーチャルリアリティにおける操作感・臨場感を向上するための技術として,遠隔地やバーチャル空間からの反力や手触りをユーザに再現提示する技術の研究を進めています.
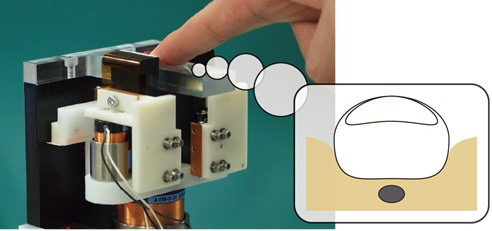
これまでに,指先で感じる「表面粗さ感」「温度感」「硬軟感」「粘着感」などについて,人の知覚メカニズムを探求しながら,メカトロニクス的な手段によりこれらの感覚を再現する方法を検討してきています.例えば,以下に示す装置では,指先に対して硬軟感としこり感を提示することができ遠隔触診などへの活用が期待できます.また,指先だけでなくより広い範囲に対して硬軟感を提示する手法も研究しています.
一方,大画面の映像ディスプレイ上で「力」のフィードバックを与えるシステムについても研究を進めています.以下のシステムでは,複数のユーザに対して,映像の物体からの反力や抵抗力を提示することができ,リアルな感触でゲームなどを楽しむことができます.
一般に「力」のフィードバックを行う際には,デバイスが地面やテーブル上に固定されている必要があります.これはユーザに力を与える際には必ず反力が発生するためです.そのため,ゲームパッドなどのようなハンドヘルド型デバイスの場合には力のフィードバックが困難です.そこで,触覚刺激により「力」を錯覚させる研究を行っています.
これまでの研究により,物体を握る「手のひら」に圧力刺激を加えると,あたかも,その物体から押されているような「力」を錯覚することがわかりました.下図のデバイスでは,その錯覚現象を利用して,遠隔地からの反力をコントローラを持つ手に伝えます.

環境ロボティクス
ロボットが環境の助けを借りて動作することができれば,ロボットをより多様な環境で活用していくことが可能になります.そのような観点から,環境のエネルギを用いて駆動する機構について研究を進めています.
下に示す機構は,環境の熱エネルギを利用して動作する受動歩行機構と二輪移動機構です.いずれの機構においても,センサやアクチュエータは何も搭載されていませんが,高温の熱源上に配置すると熱のエネルギを運動に変換し二足歩行や回転走行を行います.現在は床面に非常に高い温度(100度以上)を必要としますが,必要温度の低減に向けた研究を進めており,将来は例えば真夏の高温の地面の上などで歩行などができるようになることを期待しています.
他にも環境の特性を活かした移動機構の研究を進めています.下に示すのは静電気力で壁面に吸着して移動する壁面移動機構です.吸着だけでなく移動自体も上述の静電アクチュエータを用いて行うことで,完全に静電気力だけで動作する薄型の壁面移動機構を実現することもできます.そうした機構は例えば強磁場環境下でも安定に動作することが可能であり,特殊環境での活用が期待できます.


過去のプロジェクト









過去の研究の記録
(先端メカトロニクス研究室=樋口・山本研)