導電性材料や生体組織などの連続体と電磁界の相互作用を理解・活用し,新しいユビキタスイメージング技術の確立と多次元インタフェースの創成を目指します.また,それらを駆使したロボット環境の構築,身体機能の拡張,知覚特性の解明,産業・医療への応用に取り組み,人々の豊かな生活に貢献します.
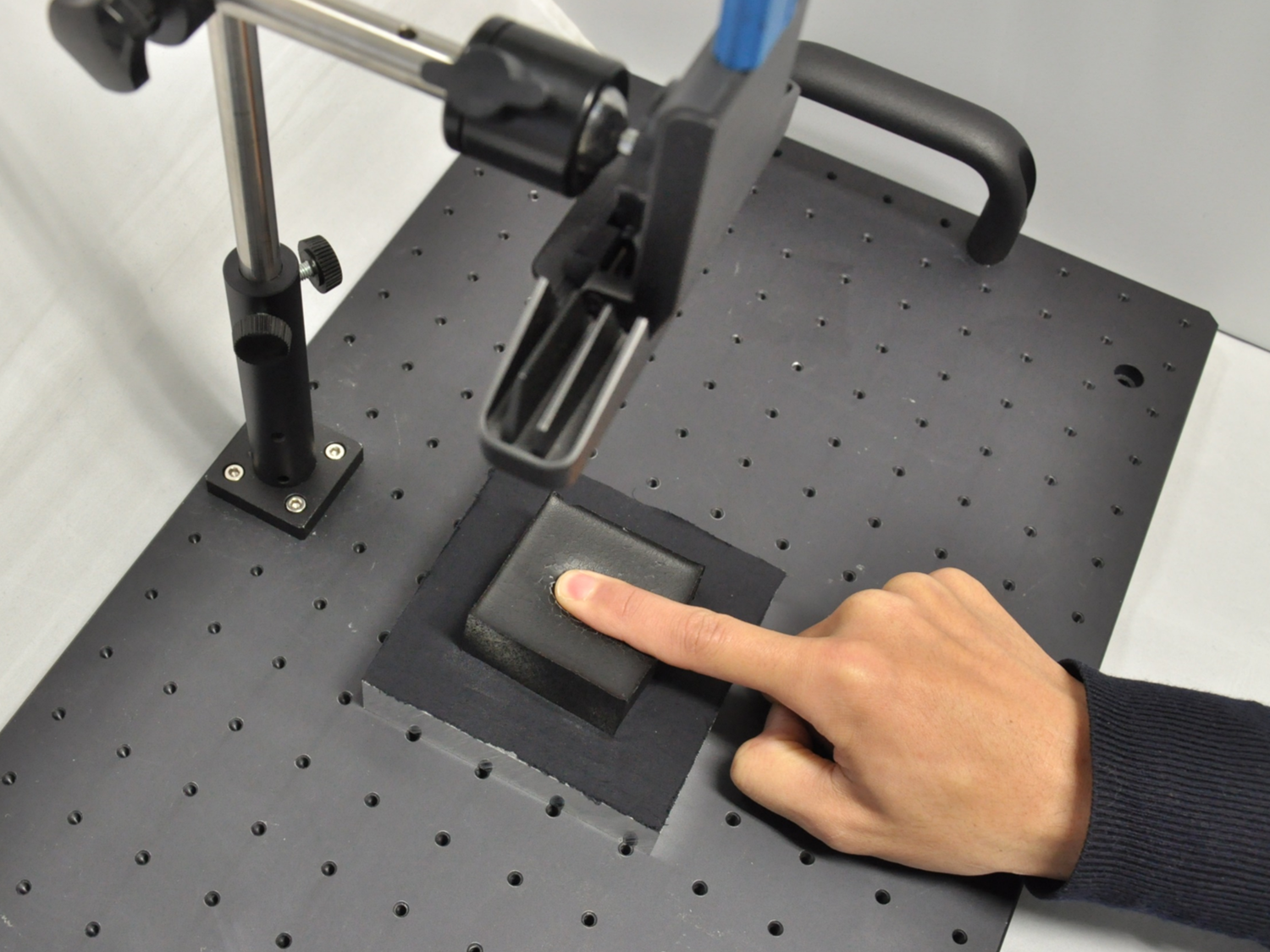
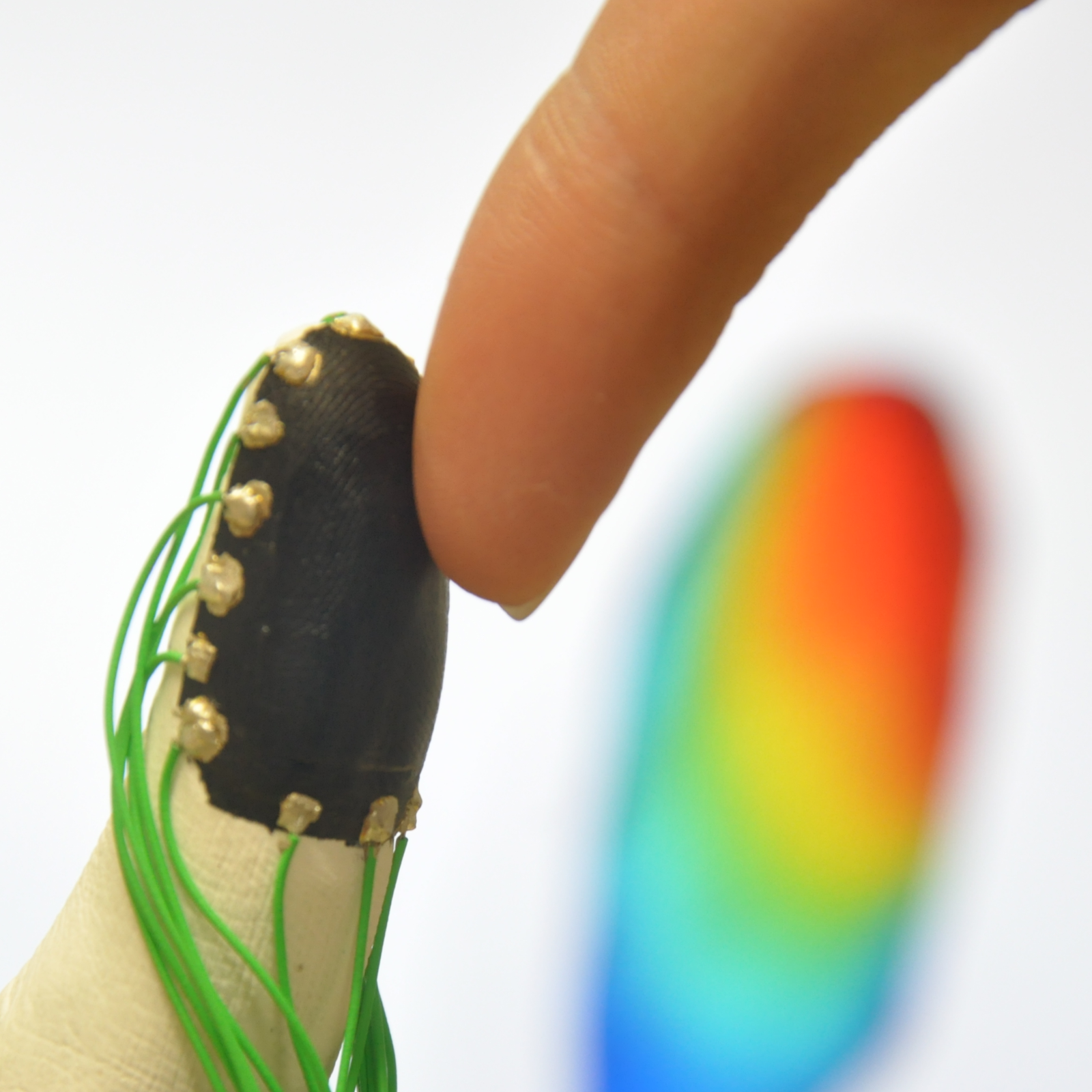
センサデバイス
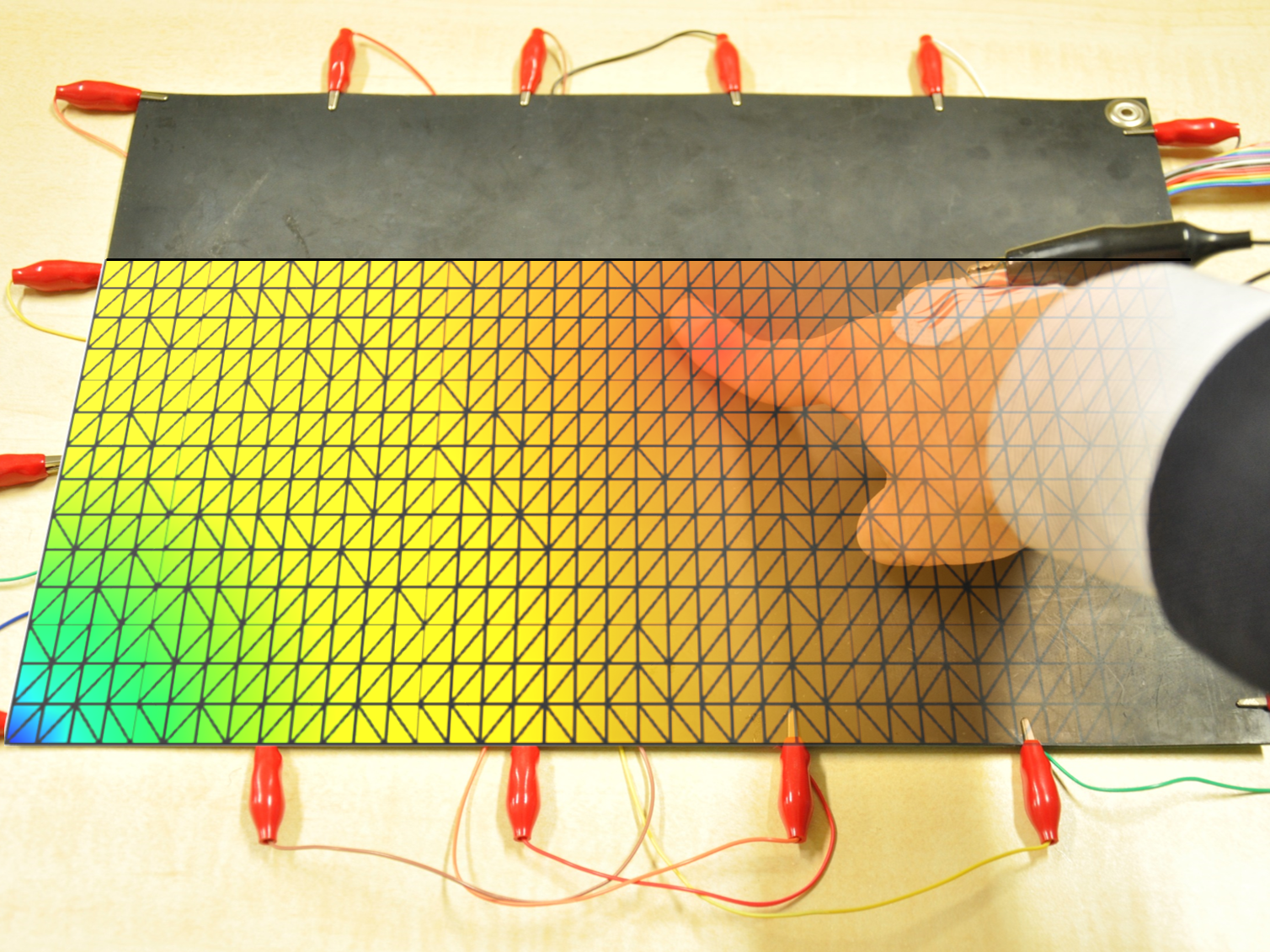
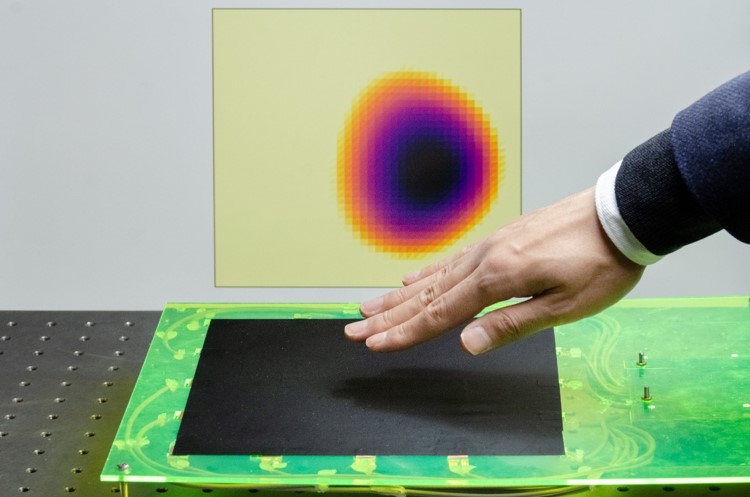
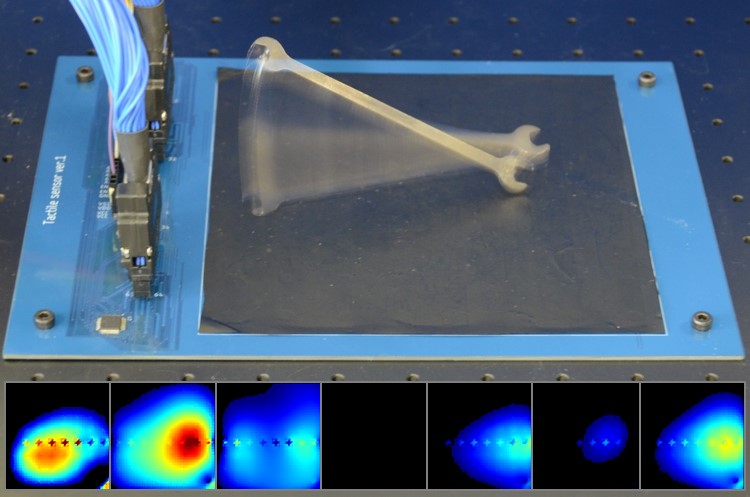
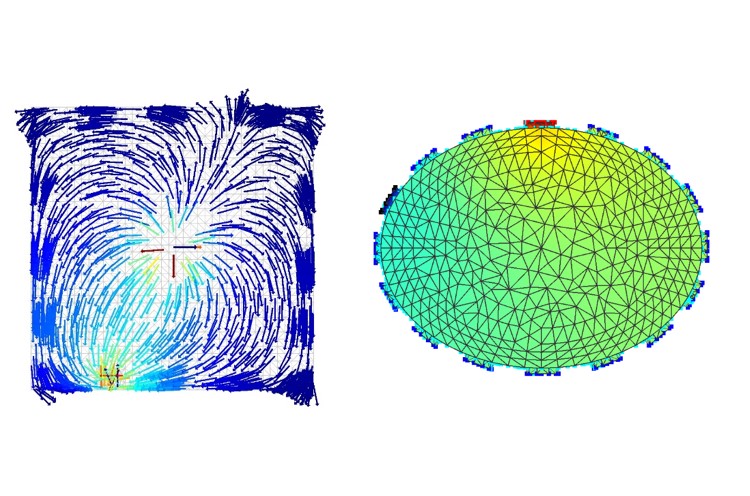
導電性材料に物体内部の電気特性分布を可視化する電気インピーダンストモグラフィを適用することで,新しいセンサデバイス技術を創出しています.例えば,電気接触抵抗,近接静電容量,温度抵抗依存性などに着目することで,接触圧力,近接,温度の可視化を可能にしてきました.現在では,シミュレーションによる導電性材料の最適設計や,計測回路・再構成アルゴリズムの改良に取り組むことで,高時空間分解能で多機能な計測技術を探求しています.さらに,シート材料を用いた簡便なセンサデバイスの特長を生かし,家庭用ロボットやインフラ点検システムなどへの応用を想定した開発を進めています.
- S. Hayashi, S. Yoshimoto, A. Yamamoto, Noncontact 2-D Temperature Imaging of Metallic Foils Using Electromagnetic Tomography. IEEE Sensors Journal, Vol.23, No.16, pp.17942-17950, 2023.
- A. Kojima, S. Yoshimoto, A. Yamamoto, Optimization of Electrode Positions for Equalizing Local Spatial Performance of a Tomographic Tactile Sensor. Frontiers in Robotics and AI, section Smart Sensor Networks and Autonomy, Vol.10, No.1157911, pp.1-9, 2023.
- Z. Li, S. Yoshimoto, A. Yamamoto, Tomographic Proximity Imaging Using Conductive Sheet for Object Tracking. Sensors, Vol.21, No.8, pp.2736:1-16, 2021.
- S. Yoshimoto, Y. Kuroda, O. Oshiro, Tomographic Approach for Universal Tactile Imaging with Electromechanically Coupled Conductors. IEEE Transactions on Industrial Electronics, Vol.67, No.1, pp.627-636, 2020.
- S. Hattori, S. Yoshimoto, A. Yamamoto, Wearable Skin Resistance-based Tomographic Sensor for Imaging Contact Pressure Distribution on the Human Body. In Proc. The 45th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 290:1-4, Sydney, Austlaria, 2023.
- R. Asahi, S. Yoshimoto, H. Sato, Tomographic tactile sensor-based finger motion analysis system to identify number of grasping fingers for evaluating fine motor skills. In Proc. 2023 IEEE International Symposium on Medical Measurements and Applications, pp.1-6, Jeju, South Korea, 2023.
- H. Mitsubayashi, S. Yoshimoto, A. Yamamoto, Adaptive Potential Scanning for a Tomographic Tactile Sensor with High Spatio-Temporal Resolution. In Proc. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.9827-9832, Las Vegas, USA (online), 2020.
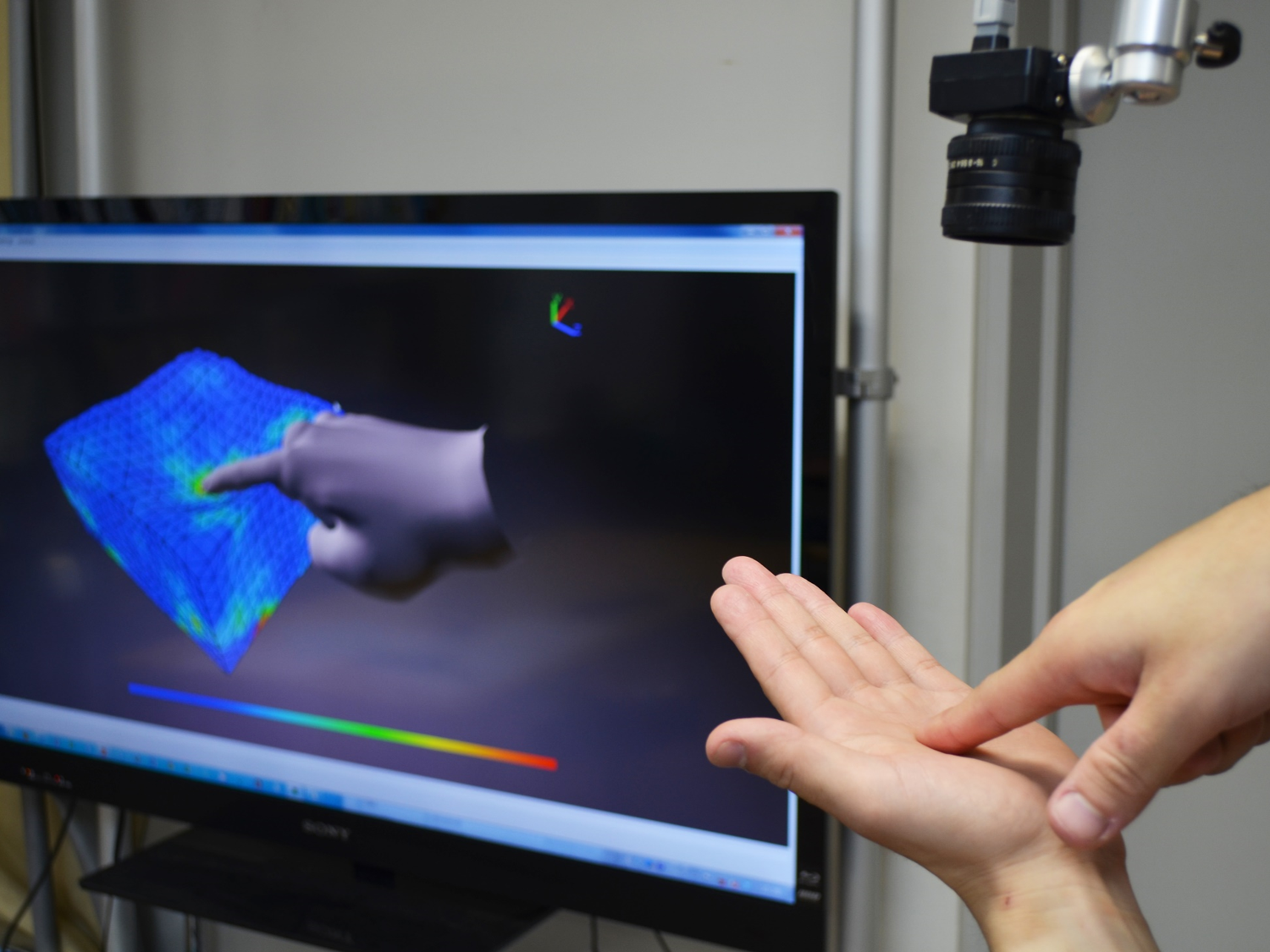
生体イメージング
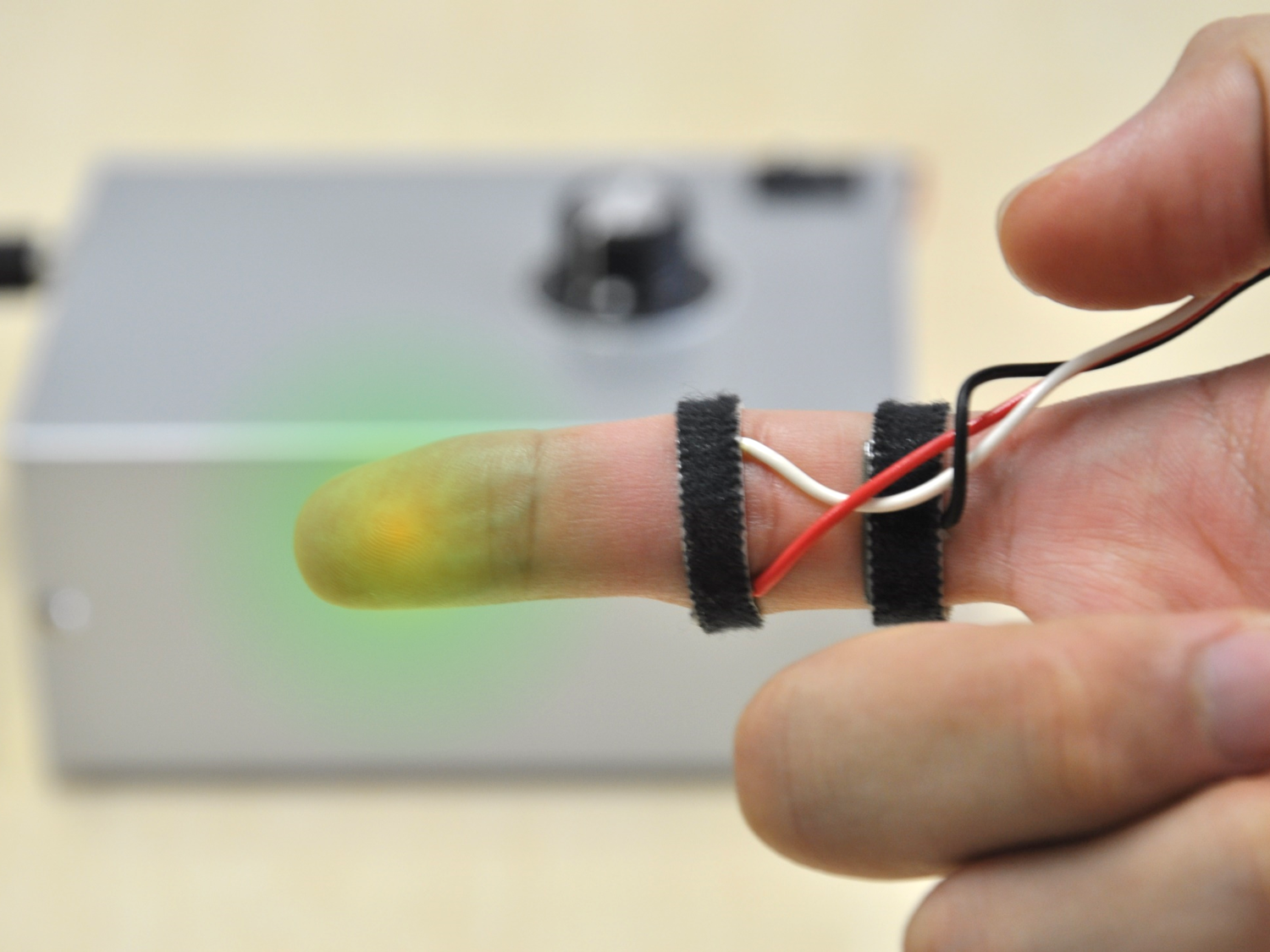
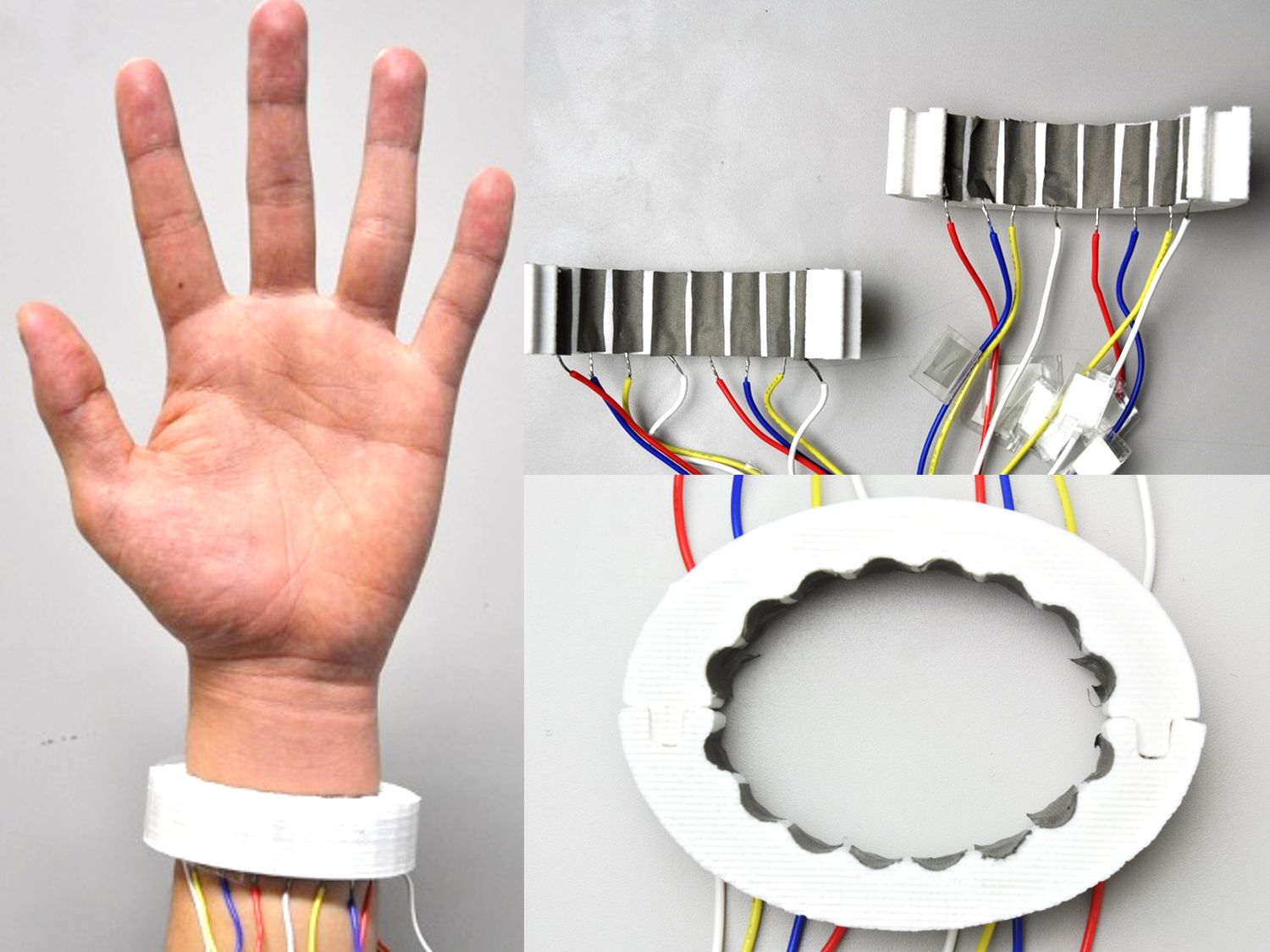
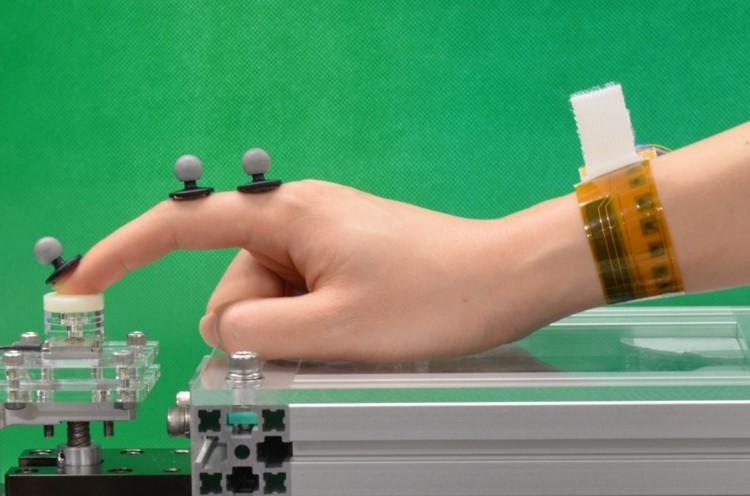
生体組織の電気機械特性に着目し,身体の状態認識や運動推定,環境計測を行うユビキタス生体イメージング技術の開発に取り組んでいます.これまでに,軽度な筋断裂を検出するためのインピーダンス変化の検出に関する研究,手指の動作や操作を推定するための接触インピーダンス計測に関する研究,血流変化を利用した接触力や弾性推定に関する研究を行ってきました.特に,計測における励起方法を工夫することにより,機能と構造の両立方法を探求しています.これらのユビキタス生体イメージング技術により,予防医療やIoTへの貢献を目指しています.
- S. Yoshimoto, Y. Toyoda, A. Yamamoto, Influence of Electrode Positions on Performance of Hand Motion Capture using EIT. IEEE Transactions on Medical Robotics and Bionics, Vol.4, No.1, pp.285-288, 2022.
- S. Yoshimoto, N. Ikemoto, H. Ishizuka, S. Ikeda, Y. Kuroda, O. Oshiro, Efficient and Robust Detection of Local Impedance Changes using Selected Electrical Excitation Conditions. IEEE Access, Vol.8, No., pp.205778-205787, 2020.
- S. Yoshimoto, S. Hinatsu, Y. Kuroda, O. Oshiro, Hemodynamic Sensing of 3-D Fingertip Force by using Non-pulsatile and Pulsatile Signals in the Proximal Part. IEEE Transactions on Biomedical Circuits and Systems, Vol.12, No.5, pp.1155 - 1164, 2018.
- S. Yoshimoto, Y. Kuroda, O. Oshiro, Estimation of Object Elasticity by Capturing Fingernail Images during Haptic Palpation. IEEE Transactions on Haptics, Vol.11, No.2, pp.204-211, 2018.
- J. Kawaguchi, S. Yoshimoto, Y. Kuroda, O. Oshiro, Estimation of Finger Joint Angles Based on Electromechanical Sensing of Wrist Shape. IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol.25, No.9, pp.1409-1418, 2017.
- M. Kondo, S. Yoshimoto, A. Yamamoto, Influence of Excitation Frequency on the Performance of Peripheral Blood Flow Imaging using Electrical Impedance Tomography. In Proc. The 45th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, 292:1-4, Sydney, Austlaria, 2023.
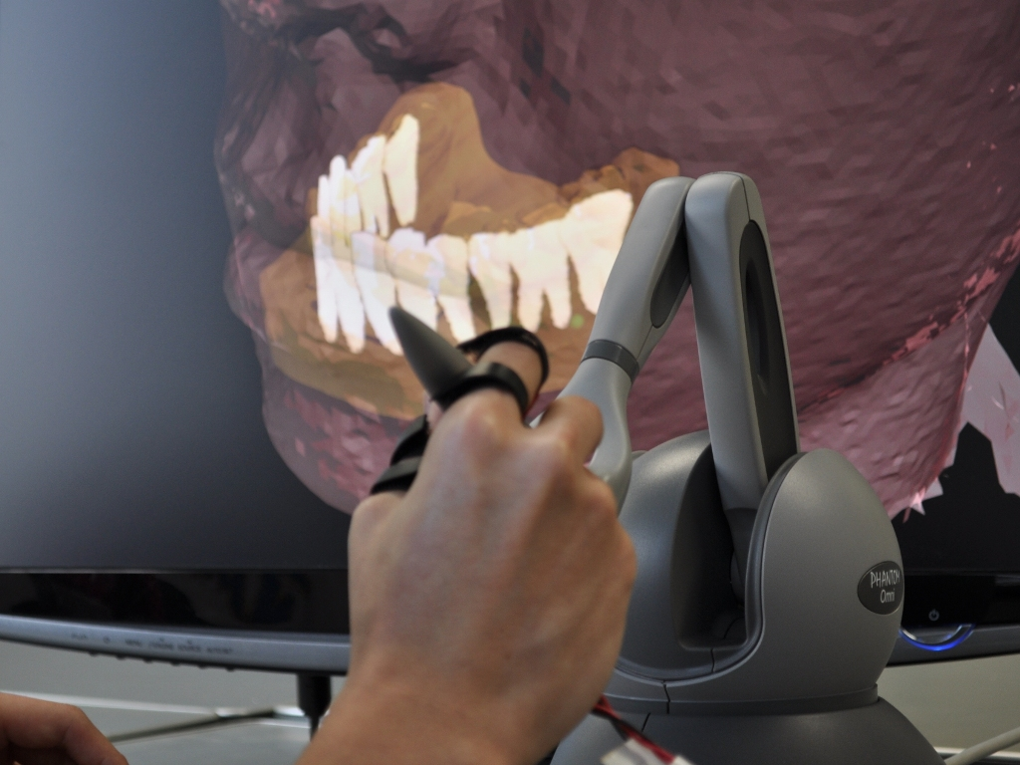
ヒューマンインタフェース
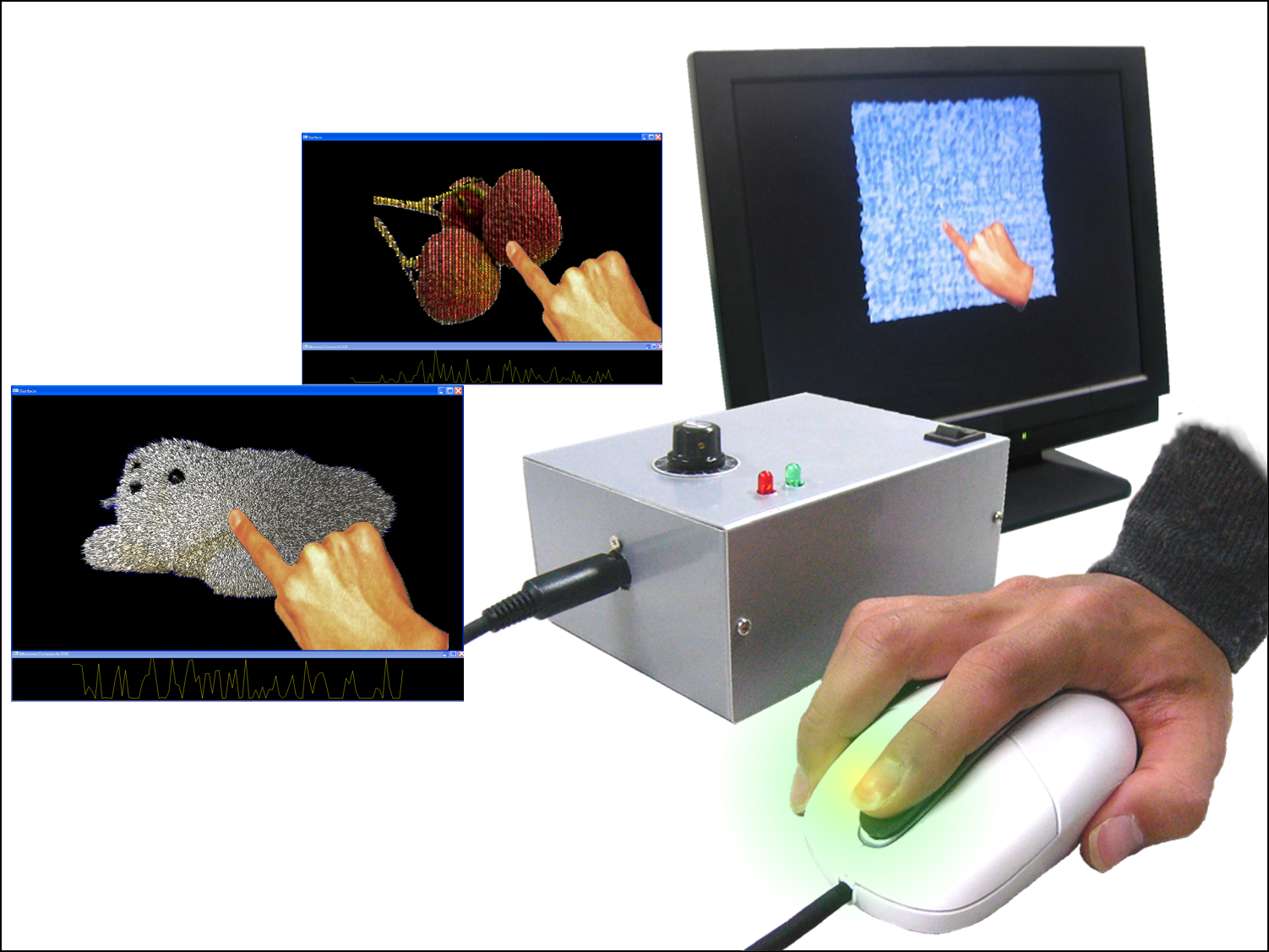
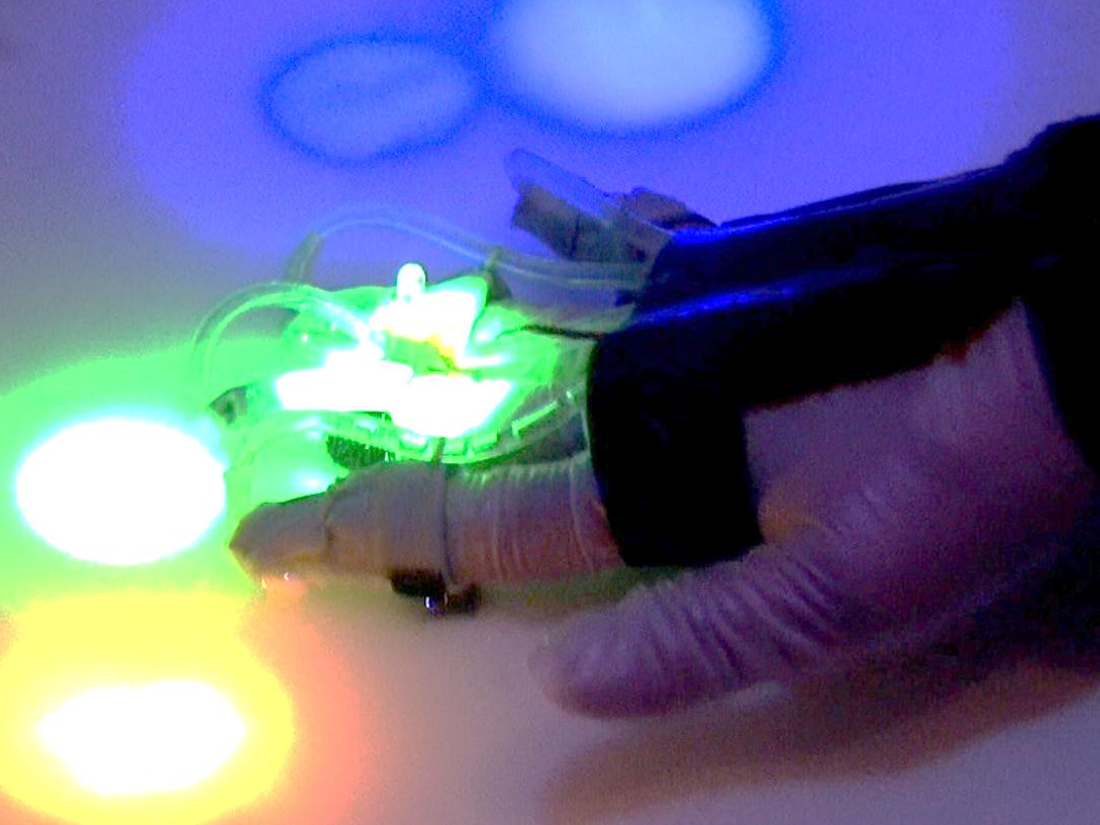
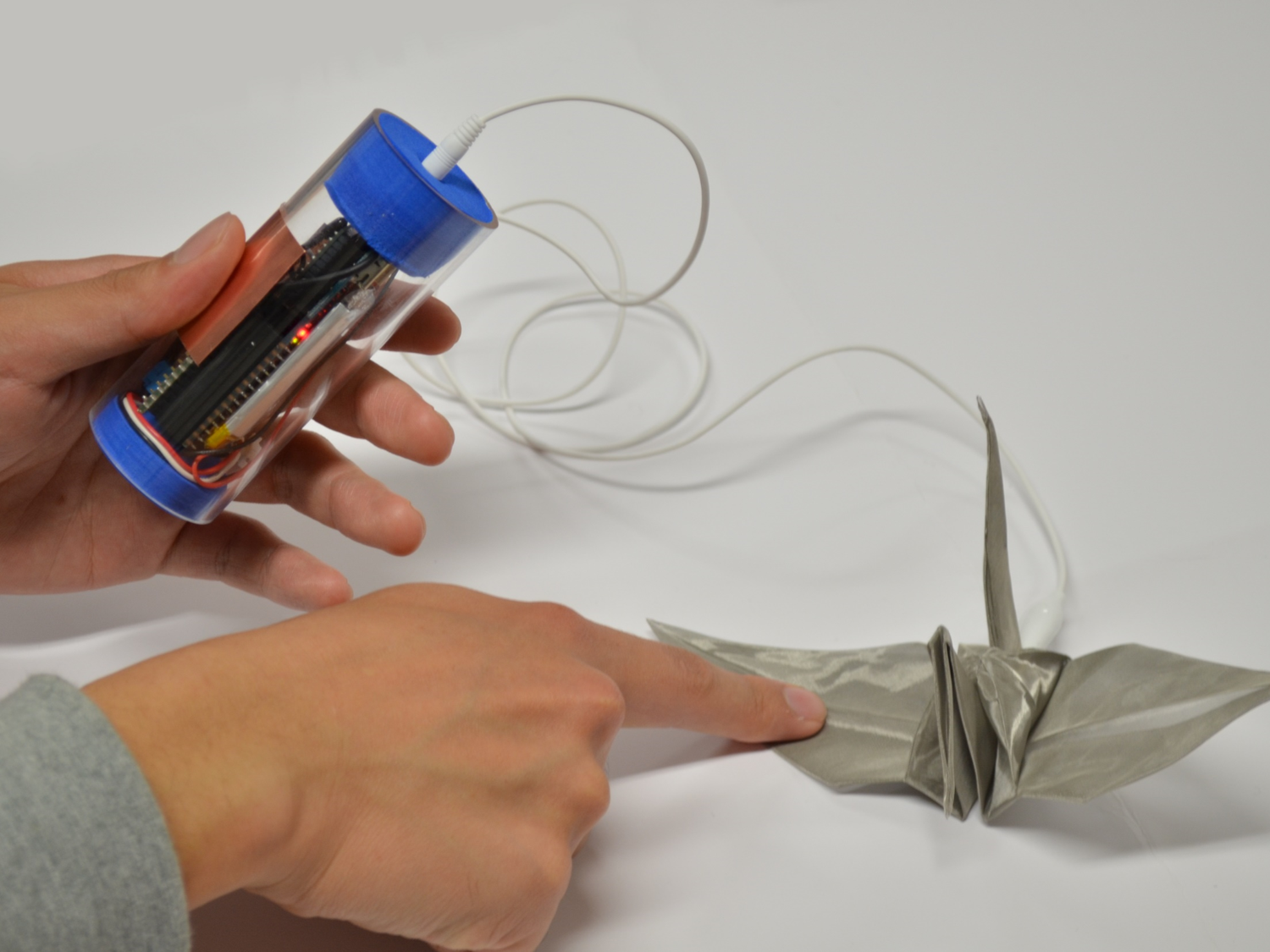
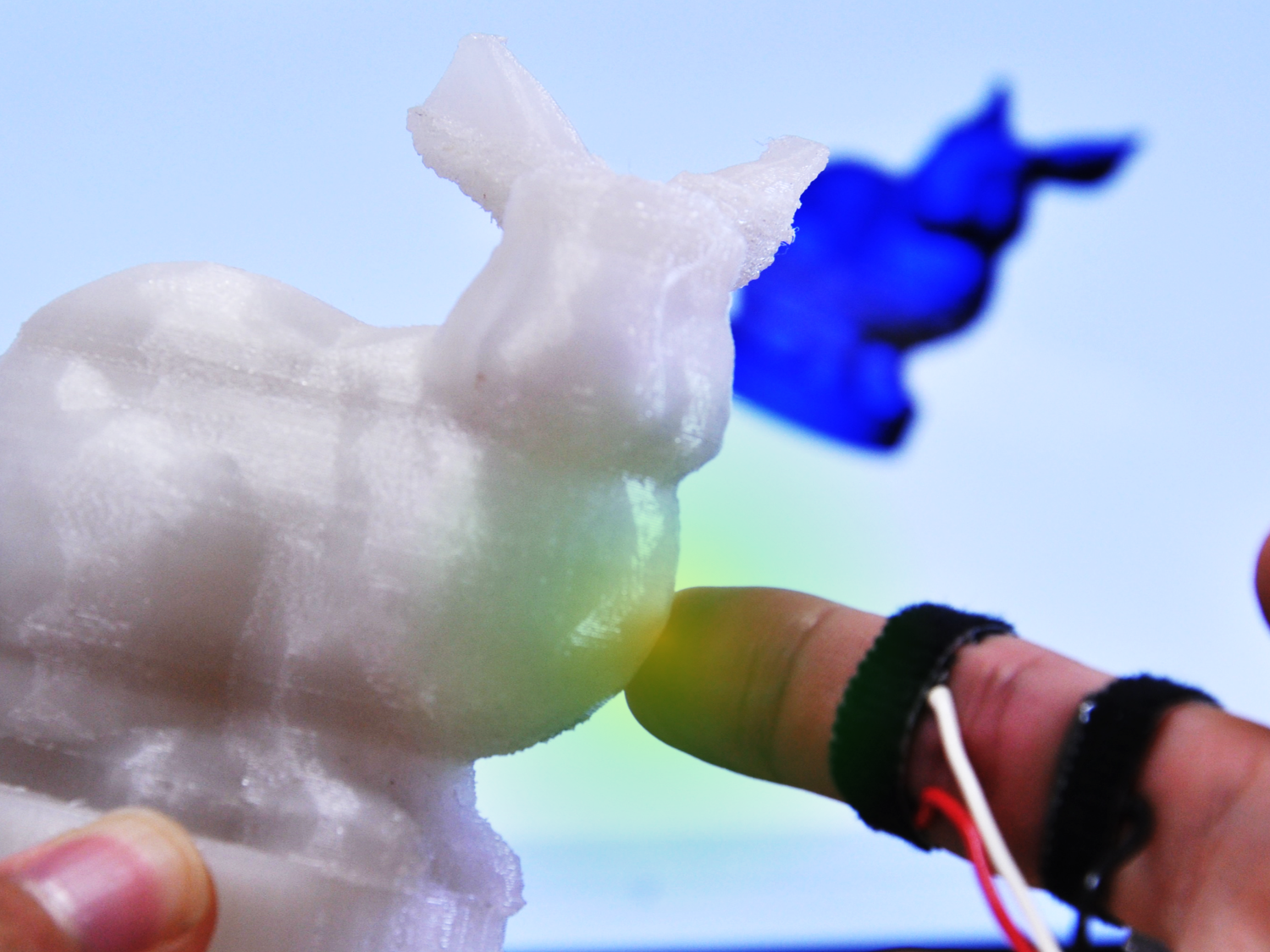
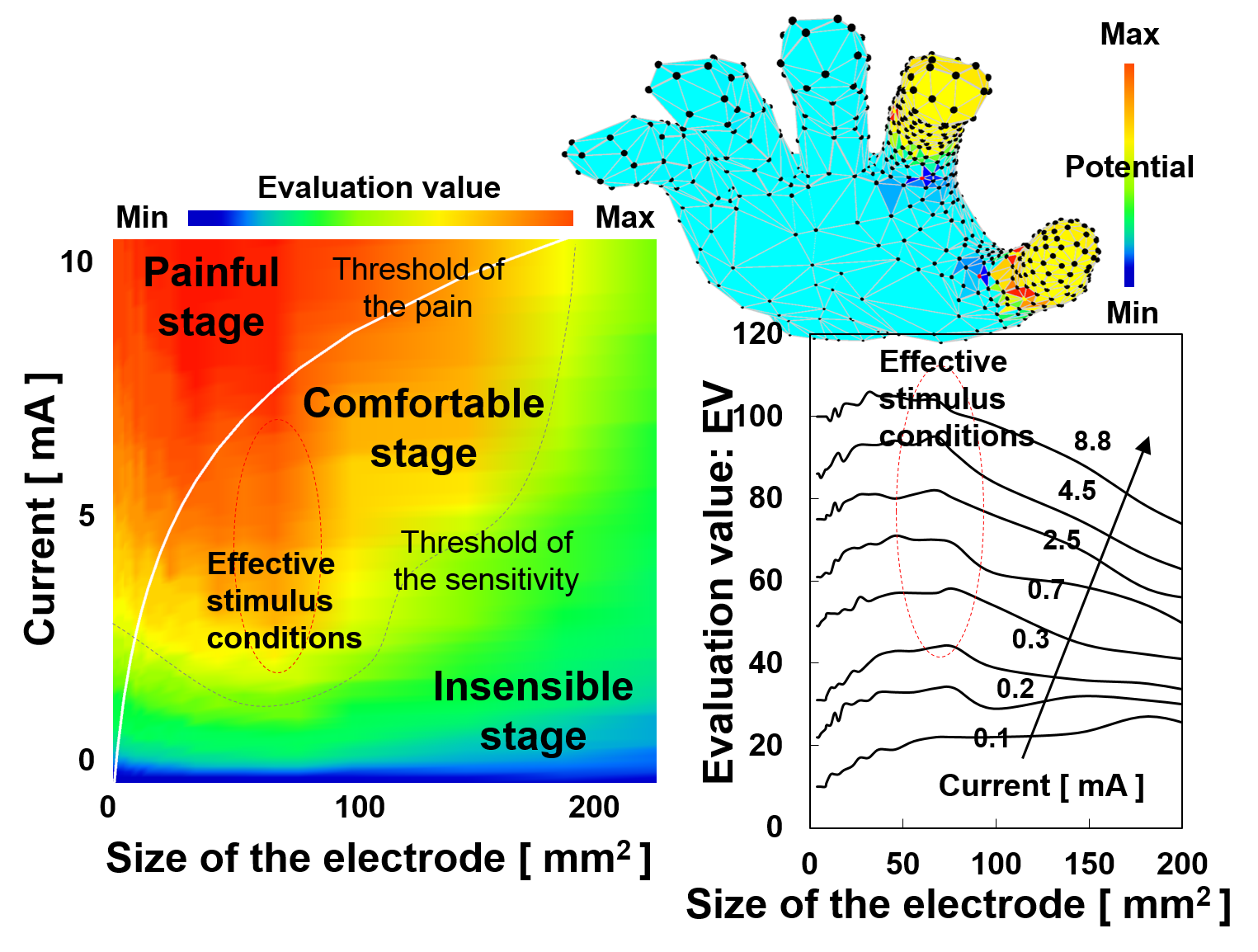
主に人に力触覚を伝えるためのディスプレイ技術(ハプティックインタフェース)に関する研究とその医療応用・産業応用に関する研究に取り組んできました.機械刺激や電気刺激を利用して人に力触覚を伝えるためのディスプレイ技術(ハプティックインタフェース)に関する研究を行っています.また,それらを利用することで,触錯覚現象などの人の知覚特性の解明に挑戦し,小型なデバイスや効果的な刺激方法を探求しています.さらに,開発したハプティックインタフェースを用いた手術手技の訓練システムの構築や,遠隔操作システムの高品質化に取り組むことで,医療や産業への貢献を目指しています.
- S. Yoshimoto, A. Yamamoto, Pressure Stimulus to the Palm Substitutes and Augments Force Sensation. IEEE Transactions on Haptics, Vol.14, No.4, pp.930-935, 2021.
- S. Yoshimoto, Y. Kuroda, M. Imura, O. Oshiro, K. Nozaki, Y. Taga, H. Machi, H. Tamagawa, Electrotactile Augmentation for Carving Guidance. IEEE Transactions on Haptics, Vol.9, No.1, pp.43-53, 2016.
- S. Yoshimoto, Y. Kuroda, M. Imura, O. Oshiro, Material Roughness Modulation via Electrotactile Augmentation. IEEE Transactions on Haptics, Vol.8, No.2, pp.199-208, 2015.