|
1自由度プロトタイプの試作例を図1に,その動作を示す模式図を図2に示す.本装置は,内部に微細な帯状電極を有する2枚のフィルムからなる.これら2枚のフィルムが超薄型静電アクチュエータを構成する.一方のフィルム(固定子)は,ベース台に固定されており,他方のフィルム(移動子)はミニチュアリニアガイドで案内され,左右に移動可能となっている.操作者は移動子フィルム上に直接指をおき,移動子フィルムを指と共に左右に動かすことで,静電アクチュエータの発生する推力を指先に感じ,その結果として,特定の表面性状を知覚する. 図2は,操作の様子を模式的に表した図であるが,この図に示すように,指を左右方向にフィルムごとすべらせることによって,何らかの面粗さや摩擦特性を有する面をなぞっているかのような感触を感じ取ることができる. |
|
|
本装置で用いているフィルムの模式的な構造を図3に示す.フィルムは,フレキシブルプリント基板技術により製作されており,フィルム材質はポリイミド,電極部分は銅である.フィルム内の電極は大きく3分割されており,いずれの部分も,電極は3相ごとに結線された200µmピッチの3相帯状電極となっている.ただし,リプルの少ない推力特性を得るために,移動子側電極にはスキューが施してある(=波形形状になっている). 3分割された電極のうち,両側の二つが推力発生用電極として用いられ,中央の電極は,静電容量式リニアエンコーダとして移動子位置の測定に用いる.これにより,特別な外付け装置無しに移動子の位置(=指の位置)を測定することができる. |
|
|
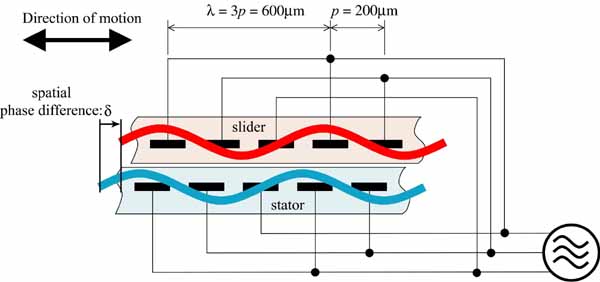
触感提示原理について述べる前に,薄型静電アクチュエータの力発生について述べる. 図4の断面模式図に示すように,固定子,移動子それぞれのフィルムの3相電極に対して,接続順が互いに逆になるよう3相正弦波を印加すると,両フィルムの上に正弦波状の電位分布が発生する.このように周期の等しい二つの正弦波状電位分布が存在する場合,両者の間には,静電気力の相互作用により,図5に示すような,両電位分布の空間的位相差に応じた推力が発生する. こうして発生した推力は,移動子フィルムを介して,操作者の指に伝達される.よって,この推力発生をコントロールすることにより,操作者の指に対して,様々な力を与えることができ,それによって,様々な表面性状を知覚させることができる.特に,本装置は,電極ピッチが細かいことと,アクチュエータと指との間に運動伝達機構が介在しないことにより,µmオーダの位置分解能で,指に与える力を制御することが可能である. |
|
|
指先に与える力(=アクチュエータの発生力)を,指先の位置に応じて変化させることで,様々な感覚を操作者に与えることができる.ここでは,「周期的に分布した微細な突起を有する表面」をなぞった感覚を与える手法について述べる. Minskyらによれば,図6に示すように,物体表面の微細凹凸形状の傾きに比例した(水平方向の)力を操作者の指先に与えることで,操作者に擬似的に凹凸面を感じさせることができる[2].よって,例えば高さ ±H,周期 λで正弦波状にうねった面を表現する場合,表面形状 P を位置 x に対して,
と定義すれば,
で表される推力をアクチュエータに発生させることで,正弦波状の表面を提示できる(ただし,kfは比例定数). |
|
として制御することで,正弦波状にうねった表面を提示することができる(ただし,p=200µm).図7にその一例を模式的に示す.
|
| 図7 周期突起の表現方法 |
本装置は,移動子フィルムの面全体で推力を発生するため,複数の指で直接移動子に触れて力の提示を受けることが可能である.そのため,スティック等を介して力の提示を受けるのに比べ,より現実に近い感覚を得ることができる.また,軽量なフィルムを利用しているため,可動部分の重量は25gと小さく,操作者は可動部の存在を意識することなく操作が可能である. ここでは,一定間隔の突起を有する面を表現する手法について報告したが,本装置は原理的には,様々な突起形状や,摩擦特性の再現も可能である.今後は,電圧の制御方法を工夫し,様々な表面特性を再現する実験を行いたいと考えている.