- はじめに
近年,物体表面をなぞった際のテクスチャ感を再現する触覚ディスプレイ(皮膚感覚ディスプレイ)の開発が盛んに行われている.本研究では,触覚の様々な要素の内,物体の表面粗さ感や突起感などのテクスチャ感を,静電気力を用いて再現する装置(=静電触覚ディスプレイ)の開発を行っている.静電気力を用いる場合,力発生に必要な電極を容易に薄型化できるため,従来装置に比べて薄くてコンパクトな装置を構成することができる.また,透明導電材料を用いることにより,透明な触覚ディスプレイを製作することが可能であり,これを通常の視覚ディスプレイと組み合わせることにより,視覚と触覚を融合して提示することができる.
- 装置構成
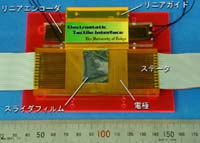
静電触覚ディスプレイの構成例を図1に示す.この装置は50本の平行電極を有するステータ部分と,フィルム状のスライダから構成されている.ステータ電極は電極幅0.8mm,電極長さ35mm,電極ピッチ1mmであり,表面に厚さ7.5µmのポリイミドフィルムを絶縁用に貼り付けている.図2に本装置の操作方法を示す.操作者はスライダ上に指をおき,指とスライダを一体として動かすことにより,表面粗さ感などの感覚提示を受ける.なお,図1では,電極部分が見えるように装置が構成されているが,このように電極が見えている状態で用いた場合,被験者の感じる表面粗さ感が電極ピッチに影響される傾向がみられたため,図2の構成例においては,ポリイミドフィルムの裏面を黒色に塗ることで電極部分を視覚的に遮蔽している.
スライダは,導電性を持たせるため裏面にアルミニウムを蒸着したポリエステルフィルムを用いている.フィルム寸法は,幅20mm,長さ30mm,厚さ約9µmである.スライダはリニアガイドと静電容量式リニアエンコーダに接続されており,左右方向の変位が測定できるようになっている.
 |
 |
図1 静電触覚ディスプレイ |
図2 操作例 |
- 感覚提示原理
本装置で想定している感覚提示原理を図3に示す.電極に電圧を印加すると,電圧印加した電極とスライダとの間に静電気力が発生する.この状態でスライダを指で動かすと,静電気力を垂直抗力として,各電極への電圧印加パターンに応じた摩擦力分布がスライダ裏面に生ずる.スライダは厚さ9µmと薄くまた柔軟であるため,この摩擦力はその分布を大きく変えることなく指先に伝達される.そのため,操作者の指は,電圧印加した電極上において剪断力を受け,その部分に突起感等を感ずることができる.よって,各電極への印加電圧を制御することにより,その印加パターンに応じたテクスチャを提示することが可能である.
上記の提示原理では,提示するテクスチャと電極とを単純に関連づけてしまっているため,提示テクスチャの分解能は電極ピッチと等しくなってしまい,細かなテクスチャ表現が難しい.そこで,より微細なテクスチャ感を表現するために,本装置ではリニアエンコーダにより測定したスライダ変位(=指先の変位)に基づいて,各電極への印加電圧に変調を加える.スライダ変位を高分解能で測定し,それに基づいて電圧を変調することで,電極ピッチよりも微細なテクスチャを表現することが可能であり,数十ミクロン間隔で突起が分布するような微細な表面テクスチャをも表現することができる.
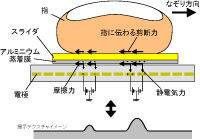 |
図3 原理 |
- 透明触覚ディスプレイによる視覚と触覚の融合提示
従来,コンピュータから人へ情報を伝達する手段として視覚・聴覚情報が主に扱われてきたが,これに触覚情報を付加することにより,操作性や臨場感が高められると考えられる.GUI画面上において,例えば,画面をなぞった際に画像に応じた触感を操作者に返す,触感により操作者にボタン位置を知覚させる等といったことを実現できればより高度な情報提示が行える.
上記で示した静電触覚ディスプレイは,電極を透明材料で構成することにより全体を透明化することが可能であり,容易に視覚ディスプレイと組み合わせて,視触覚統合ディスプレイとすることができる.そのような視触覚統合ディスプレイの例を図4に示す.この装置はタッチパネルディスプレイと,ディスプレイ上に貼り付けた透明電極からなるステータ,そして,指に巻きつけられたアルミ蒸着フィルムからなるスライダによって構成される.操作者はスライダが巻きつけられた指でLCDに表示されている模様や図形などをなぞることにより,その触感を直接得ることが可能である.
指が触れている位置をタッチパネルの位置検出機能を用いて読み取り,その位置における画面ドットの濃淡に応じた電圧を触覚ディスプレイ側に印加することで,表示された模様に応じた触感を得ることができる.
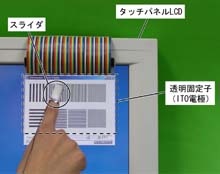 |
図4 視触覚融合ディスプレイ |