| ムービー | QuickTime, 874KB |
|
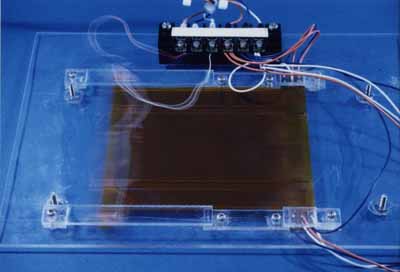
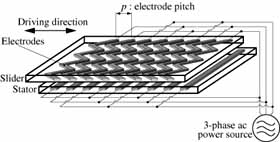
交流駆動両電極形静電モータの試作例を図1に示す.
本静電モータは,固定子・移動子の2種のフィルムからなる.固定子・移動子ともに,3相に結線された平行帯状電極を持ち,表面は絶縁膜で覆われている.
固定子・移動子ともに,帯状電極の配置ピッチは同じであり,図1の場合においては,320µmの配置ピッチとなっている. 本モータには,大別して2つの駆動方法がある. それぞれ,2周波数法,1周波数法と呼んでいるが,まず始めに2周波数法の場合について,動作原理を説明する. |
|
|
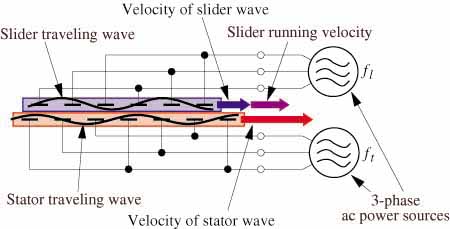
図2は,2周波数法によるモータの駆動原理を表したものである.
2周波数法においては,周波数の異なる2つの3相正弦波を,固定子・移動子のそれぞれの3相電極に印加する.
固定子・移動子,それぞれの表面近傍においては,3相正弦波の印加に従い,おおよそ正弦波状の進行電位分布が発生する.
これら2つの電位分布の間には,両者の空間的位相差に応じて,静電吸引・反発力が働き,それによって,モータが駆動される. 本モータは同期モータであり,その同期速度は固定子・移動子の両3相電極への印加周波数により定まる. 固定子側の印加周波数を fst ,移動子側の印加周波数を fsl とすると,モータの同期速度 ud は, ud = 3 p ( fst - fsl )と表される. |
|
|
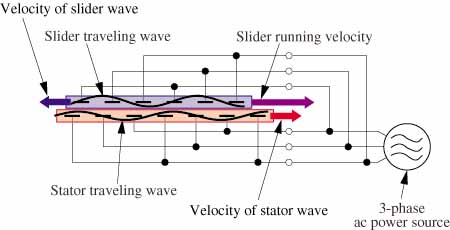
2周波数法においては,駆動に6相分の信号(3相正弦波×2)が必要とされる.
後述するように,本モータの駆動には 1000〜2000V 程度の高電圧を必要としており,そのような高電圧を発生することは容易ではないため,駆動時の信号相数の削減が求められる.
1周波数法は,信号の接続方法を工夫することにより,信号相数を6相から3相へと削減した駆動方法である. 1周波数法によるモータの駆動原理を図3に示す. 1周波数法では,1つの3相正弦波を,固定子・移動子の両者に,それぞれ接続順が逆向きになるようにして印加する. これにより,固定子・移動子上には,それぞれ逆向きに進行する正弦波状の電位分布が発生する. これらの2つの電位分布の間に働く静電気力により,モータは駆動される. 1周波数法における同期速度 us は,印加する3相正弦波の周波数を f として, us = 6 p fと表される. |
|
|
|
|
|
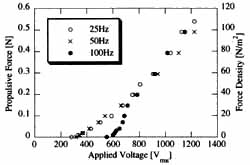
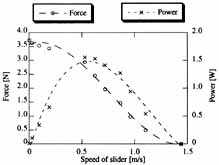
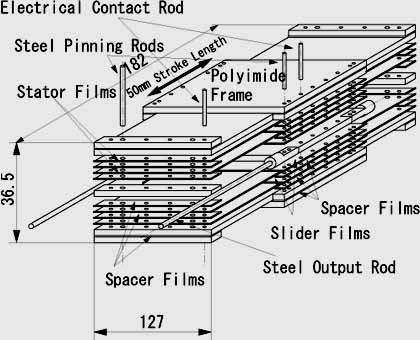
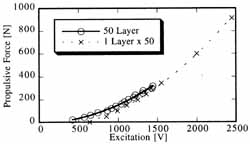
| この積層モータの推力を測定した結果を,図8に示す. 駆動に必要な3相電圧は,商用3相電源を,トランスで昇圧することにより得た. そのため,駆動周波数は50Hzであり,同期速度は60mm/sである. 1500Vrmsの電圧印加時において,推力 310N(約30kgf)を得た. 駆動速度が限られているため,あまり高い出力を得ることはできていないが,最大推力時における出力は19Wである. |
|
|
本モータは,同期モータであるため,誘導電荷形モータと比べ,制御が容易である.
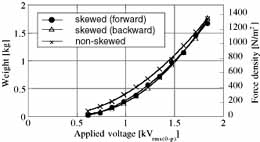
さらに,薄型・軽量,高出力密度といった特徴をあわせて考えると,本モータは小型・軽量化の進む各種メカトロニクス機器への搭載に適していると考えられる. そのような応用においては,優れた制御性能が要求されることは言うまでもないが,本モータは,電極ピッチ単位で発生する大きな推力リプルを有しているため,電極ピッチ以下(〜200µm程度)の領域においては,高い制御性能を得ることが難しい. この点を改善するために,電極をスキュー(傾斜)することを提案し,優れた改善効果を得た. 図9に,移動子電極をスキューさせたモータ構成を示す. この構成では,移動子側は,ヨー運動を抑制するために,波形の電極形状となっている. 波形の電極の山と谷の部分の間隔は,電極ピッチの1.5倍である. これは,数値解析の結果に基づき,最も優れた推力特性が得られるように定められている. |
|
|
|
| 図10 移動子の動作の様子(左:従来型,右:電極をスキューした場合) | |
| 図11に,電極をスキューした場合と,しない場合の,推力特性を示す. 推力の測定は,図4と同様に,移動子に糸を介しておもりをつり下げることにより行い,引き上げ可能な最大のおもり重量を推力とした. 印加周波数は2.5Hz (同期速度 3mm/s)に固定した. この結果より,電極をスキューした場合でも,従来と遜色のない推力特性が得られていることがわかる. |
|
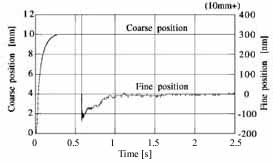
| 本モータを位置決め制御へ応用した例を示す. 駆動用電極は,200µmで配置されており,移動子側の電極はスキューされているものを利用した. フィルムの積層は行なっていない. 移動子はリニアガイドで案内するとともに,分解能6.25nmのリニアエンコーダを取り付け,移動子位置を測定できるようにした. 図12に,制御結果の一例として,10mmのステップ入力に対する応答を示す. リニアエンコーダの1パルス分に相当する±6.25nmの範囲内で位置決めが行われており,本モータがナノメートルオーダの高い位置決め能力を有していることがわかる. |
|