There are two major operation methods for this motor. One is Dual-frequency operation, and the other is Single-frequency operation.
|
| Figure 1: Dual Excitation Multiphase Electrostatic Drive |
| Movie | QuickTime, 874KB |
|
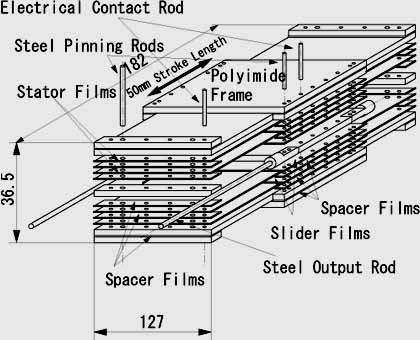
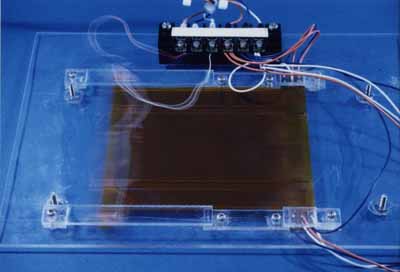
Figure 1 shows a Dual Excitation Multiphase Electrostatic Drive (DEMED).
This motor consists of two films, slider and stator.
Both slider and stator contain three-phase parallel electrodes, and their surfaces are covered by insulation layer.
In case of the example appeared in figure 1, both slider and stator are fabricated using Flexible Printed Circuitry (FPC) film technology, and electrode pitch is 320µm for both stator and slider.
There are two major operation methods for this motor. One is Dual-frequency operation, and the other is Single-frequency operation. |
|
|
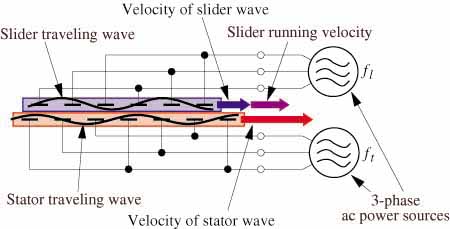
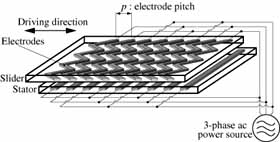
Figure 2 shows the principle of Dual-frequency operation.
In this operation method, we apply two different 3-phase ac voltages on stator and on slider.
By applying three-phase ac voltages, traveling potential waves are induced on stator and on slider.
Each potential wave has its eigen velocity which is determined by the frequecy of the applied ac.
The slider is driven by the electrostatic interaction between those two potential waves. In synchronous state, the slider will move so that both potential waves have the constant spacial phase difference. Therefore, the slider velocity is given as the differential speed of the two potential waves. Synchronous slider velocity, ud is: ud = 3 p ( fst - fsl )where, frequencies of applied ac voltages on stator and on slider are fst and fsl, respectively. That means this motor is a synchronous motor. |
|
|
In Dual-frequency operation, 6 different voltage lines are required for operation.
As stated later, this motor required high-voltages of around 1000V, and such high-voltages are not easily obtained.
Therefore, for ease of operation, reduction of the number of voltage lines is necessary.
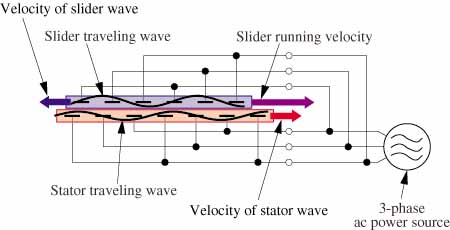
Single-frequency operation realizes such reduction. It can reduce the number of voltage lines to three, half of Dual-frequency operation. Figure 3 shows the principle of Single-frequency operation. In this operation, one three-phase ac voltage is applied both on stator and on slider. The connecting order of three phases in slider are reversed from that in stator. So, the induced potential distribution on slider has the same velocity as that on stator, but the propagating directions are different from each other. Synchronous velocity of slider in Single-frequency operation (us) is derived by substituting fsl = -fst = f into the equation (1): us = 6 p fwhere, f is a frequency of applied ac voltage. |
|
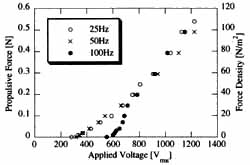
Figure 4 shows a relationship between applied voltage and thrust force. For this measurement, we put some weight on the slider via wire, and evaluate the thrust force by the maximum weight that motor can pull up. It was found that thrust force is proportional to square of applied voltage. By applying higher voltage, we got thrust force of 4.4N at 2500Vrms.
Since weight of the slider is 3.5g (the stator is also 3.5g), it is turned out that this motor can generate acceleration over 120G.
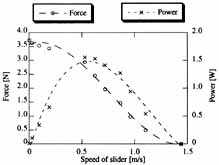
Figure 5 shows power characteristics of the motor. Applied voltage was 2500Vrms. This motor generated maximum power of 1.6W at a speed of 0.53m/s. Power per weight ration of this motor is calculated as 230W/kg. This value is almost same as that of the most powerful electro-magnetic motor.
|
|
|
|
|
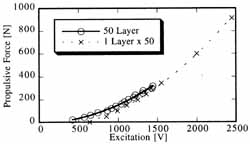
Figure 8 shows thrust force characteristics of the stacked motor.
Since we did not have powerful power source that can drive this stacked motor, we utilized commercial 3-phase net voltage and transformer.
Therefore, the frequency was fixed at 50Hz (= 60mm/s synchronous velocity).
This motor recorded 310N (30kgf) at 1500Vrms. Since velocity was fixed, the power was limited under 19W. |
|
|
Since this motor is a synchronous motor, it is more suitable for servo control compared to Pulse Driven Induction Motor.
For servo control, ripple-less thrust force characteristics is preferable, however, this motor posseses quite large force ripple.
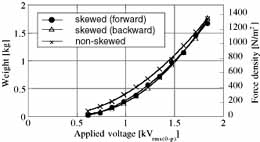
To reduce the force ripple, we proposed to utilize skewed electrodes, and achieved considerable ripple reduction.
Figure 9 shows a schematic view of a motor that utilizes skewed electrodes. Slider has skewed electrodes (washboard-shaped electrodes), whereas stator's electrodes remain straight. Skewed electrodes are designed like washboard so as to prevent yawing motion of the slider. In the skewed electrode, width from one edge to the other edge is 1.5 electrode pitches, which gives us the smallest force ripple. |
|
|
|
| Figure 10: Motions of sliders (left: normal motor, right: skewed motor) | |
| Figure 11 shows thrust force characteristics of the skewed motor. Frequency was 2.5Hz (= 3mm/s synchronous velocity). As same as figure 4, thrust force was evaluated by the maximum weight that motor can pulled up. |
|
|
The following is a description of an experimantal result of position servo control.
A single-layer skewed motor, whose electrode pitch is 200µm, was employed in this experiment.
Linear bearing was utilized to guide the slider.
Linear encoder, whose resolution is 6.25nm, was attached to the slider.
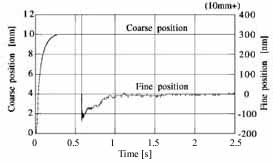
Figure 12 shows a response against 10mm step input. The slider was positioned within ±1 pulse (=±6.25nm). This result shows that this motor has positioning ability of nano meter order. |
|