| 摩擦 | 固体表面の凝着により摩擦力が増大する.潤滑も,液体潤滑剤は蒸気圧が高いため用いることはできず,固体潤滑剤に限られる. |
| 発熱 | 冷却が困難なため,発熱は防がなければならない. |
| 材料 | 材料からのガス放出が問題となるため,樹脂の使用は大きく制限される. |
| 固体潤滑剤 | 短寿命,製造の困難,発塵の問題がある. |
これらの状況では非接触駆動が有効な手段である. 非接触駆動には磁気浮上と静電浮上がある. このうち静電浮上には,発熱が少ないという利点や,真空中において発生力が増大する可能性があることなどから,本研究においては,静電浮上を利用することを提案する.
本研究室では,これまでに大気中における静電浮上搬送装置の開発を行ってきた. 静電浮上では,固定した電極と浮上体との間に働く静電吸引力を利用して,浮上を実現する. 静電吸引力は電場の2乗に比例するため,浮上ギャップが一定であるならば,より高い電圧を印加するほど,より重い浮上体を浮上させることが可能となる. しかし,大気中においては,3MV/mという大気の絶縁破壊強度のために,浮上可能な物体は,半導体用シリコンウェハや,ハードディスクドライブ用のアルミディスクなど,薄板状の物体に限られていた.
それに対し,真空中では大気中に比べ絶縁破壊強度が大きく,そのため大気中よりも大きな力を出すことができる. 真空中(10-4Pa)と大気中での絶縁破壊強度を比較すると,次のようになる.
| 大気中 | 真空中(10-4Pa) | |
| 絶縁破壊強度[MV/m] | 3 | 80 |
| 静電吸引力[N/m2] | 40 | 28000 |
これらを背景として,本研究室では超高真空対応の静電浮上搬送装置を開発することを目指している. 本ページでは,真空中(10-4Pa)での静電浮上の実現,そのための装置・制御の問題点の検討を行った結果を紹介する.
 原理を右図に示す.
並んでいる2枚の電極に電圧 V を印加すると,図中の回路イメージの
ように2つの直列な並行平板コンデンサを並べたものと等価になる.コンデンサ
と同様の電場により,静電吸引力 f を発生させる.
この静電吸引力を浮上力として利用する.
原理を右図に示す.
並んでいる2枚の電極に電圧 V を印加すると,図中の回路イメージの
ように2つの直列な並行平板コンデンサを並べたものと等価になる.コンデンサ
と同様の電場により,静電吸引力 f を発生させる.
この静電吸引力を浮上力として利用する.
浮上を安定に保つために,電極と浮上体間のギャップ d を測定し,
印加電圧 V を制御する.
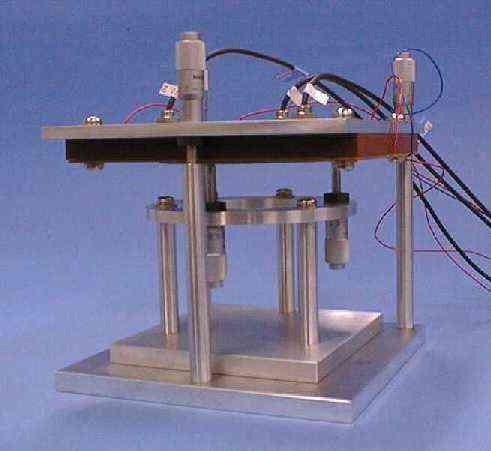 右図に製作した浮上装置の写真を示す.
大きさは15cm四方で,高さ約18cmである.
電極は電極ベース(写真:天井の部分)に取り付けられており,電極ベースと
浮上体は各々マイクロメータヘッド3本により支持されている.
右図に製作した浮上装置の写真を示す.
大きさは15cm四方で,高さ約18cmである.
電極は電極ベース(写真:天井の部分)に取り付けられており,電極ベースと
浮上体は各々マイクロメータヘッド3本により支持されている.
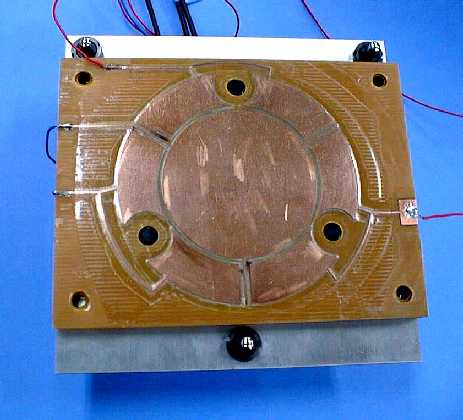 電極写真を右図に示す.周辺の電極には渦電流式ギャップセンサ(写真:黒い丸の部分)が配置されている.
電極写真を右図に示す.周辺の電極には渦電流式ギャップセンサ(写真:黒い丸の部分)が配置されている.
浮上体は円板状で以下の様である.
| No. | 直径[mm] | 厚さ[mm] | 重さ[g] |
| 薄板 | 100 | 1.1 | 23 |
| 厚板 | 100 | 2.5 | 54 |
これらの装置を入れる真空チャンバは,円筒形で底面の直径は32cm,高さは42cmである.
 制御はDSP(Digital Signal Processor)を用いて行う.
3箇所のギャップと目標ギャップとの偏差をとり,座標変換を行い中心のギャップ偏差,水平面内直行2軸の回転角度にする.
これらをそれぞれ0にするようにPID制御を行う.
印加電圧 V はPID制御の出力を逆変換し,目標ギャップで浮上体重力と釣り合うバイアス電圧を加算して出力する.
制御システムの概略を右図に示す.
制御はDSP(Digital Signal Processor)を用いて行う.
3箇所のギャップと目標ギャップとの偏差をとり,座標変換を行い中心のギャップ偏差,水平面内直行2軸の回転角度にする.
これらをそれぞれ0にするようにPID制御を行う.
印加電圧 V はPID制御の出力を逆変換し,目標ギャップで浮上体重力と釣り合うバイアス電圧を加算して出力する.
制御システムの概略を右図に示す. 真空中で厚板と薄板の浮上実験を行った.そのときの電極と浮上体との間のギャップの変化を右に示す.
図中のgap1〜3は3つのセンサ出力をあらわしている.
浮上体は,はじめマイクロメータヘッドに支持された状態で静止しており,そのときの初期ギャップは220μmである.
制御開始(0s)後,浮上体は,マイクロメータヘッドの支持を離れ,浮上を開始し,浮上している.
薄板では浮上ギャップに振動がのっており,それは約100Hzの低周波と約600Hzの高周波である.
真空中で厚板と薄板の浮上実験を行った.そのときの電極と浮上体との間のギャップの変化を右に示す.
図中のgap1〜3は3つのセンサ出力をあらわしている.
浮上体は,はじめマイクロメータヘッドに支持された状態で静止しており,そのときの初期ギャップは220μmである.
制御開始(0s)後,浮上体は,マイクロメータヘッドの支持を離れ,浮上を開始し,浮上している.
薄板では浮上ギャップに振動がのっており,それは約100Hzの低周波と約600Hzの高周波である. 厚板では右図のように安定浮上し,目標ギャップ(220μm)±10μmに収まった.
浮上はこの状態で安定しており,最長30分間の浮上を実験している.
厚板では右図のように安定浮上し,目標ギャップ(220μm)±10μmに収まった.
浮上はこの状態で安定しており,最長30分間の浮上を実験している.