静電気力を用いた紙送り機構
キーワード:静電気力,静電アクチュエータ,紙送り,搬送
はじめに
本研究室では,数種の高出力静電モータの開発を行っている.
それらのモータの中で,電極を有する固定子と高抵抗体の移動子から構成される誘導電荷形静電モータ[1]では,移動子を紙に置き換えて静電気力により直接駆動することができ,静電力による直接紙送り機構[2]を構成することができる.
現在の複写機等の事務機器の紙送りは,電磁モータとローラを組み合わせた機構が主役であるが,この機構には,
- 減速機構が必要なので装置が大きくなる.
- 摩擦力を駆動力としているために,摩擦の小さな紙は送りにくい.
- 摩擦を発生させるための押し付け力が働いている紙の一部分に,大きな駆動力を加えるため,極薄の紙を搬送するときに紙を破損するおそれがある.
などの問題がある.
また,新しい紙送りの方法として,超音波モータを応用する研究[3-5]も行われている.
この方式は紙送り機構の小型化には有効であるが,駆動力として摩擦力を利用している点では従来と同じである.
紙の一部に力を加えている点でも従来と変わっておらず,摩擦の小さい紙,強度の弱い紙の搬送には適していない.
ここでは,上記の3つの問題を解決する手段として,誘導電荷形静電モータによる直接紙送り機構を紹介する.
動作原理
動作原理については,誘導電荷形静電モータのページを参照してください.
紙の抵抗率
誘導電荷形静電モータにおいては,移動子の表面抵抗率が駆動の可否を決める重要な要素となる.
誘導電荷形静電モータでは,まず,移動子上に電荷を充電し,その後,固定子側電圧パターンを移動させ,固定子側電圧と移動子上に充電された電荷との間の静電気力によって,移動子を駆動する.
この際,移動子の表面抵抗率が低すぎると,移動子が1ステップ移動する前に,移動子上に充電された電荷が消失してしまい,十分な駆動が行えない.
また,逆に表面抵抗率が高すぎると,移動子上への電荷の充電に要する時間が長くなり,迅速な駆動を行うことができない.
解析によると,安定した駆動のためには,表面抵抗率σが,
1013 ≦ σ ≦ 1015 [Ω]
を満たすとき,安定かつ迅速な駆動を行うことができる.
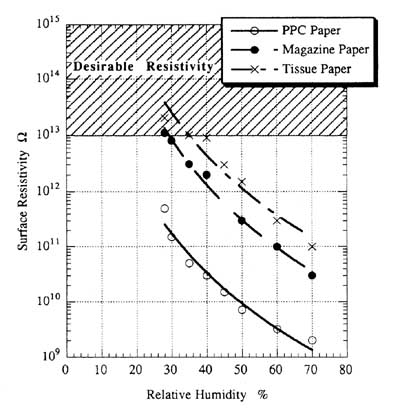
これに対し,紙の表面抵抗率は相対湿度に非常に敏感で[6],109~1016Ωの範囲で大きく変化する[7].
コピーやレーザプリンタの記録媒体として紙を用いた場合,画質の安定領域は109~1013Ωの範囲にあり[8],このような紙では,乾燥した状態でも画質の安定性を確保し,静電気力による紙の張り付きを防止するために,導電性の材料が塗工されている[7,9].
図1は,PPC用紙,更紙,ティッシュペーパの表面抵抗と相対湿度の関係を測定した結果である.
誘導電荷形静電モータに必要な表面抵抗と比べると,紙の表面抵抗は若干低い.
 |
| 図1 紙の表面抵抗と相対湿度の関係 |
搬送実験
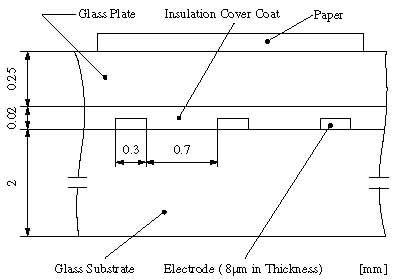
搬送実験は,図2のような断面の搬送装置を用いて行った.
搬送に有効な電極部の面積は265mm×285mmである.
電極のピッチは,駆動回路の発生可能な最高電圧±1kVが,この電極が絶縁破壊しない最高電圧となるように,1mmとした.
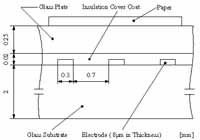 |
| 図2 搬送装置の断面模式図 |
搬送対象には,和紙,更紙,プリンタ用紙,PPC用紙の4種類の紙を用いた.
紙の寸法は,幅50mm,長さ350mmとした.
和紙,更紙,プリンタ用紙,PPC用紙の重量は,それぞれ,0.33g,0.89g,0.82g,1.16gであった.
摩擦係数は,和紙が0.1~0.2,他の紙では0.2~0.3であった.
駆動電圧は±1kV,駆動波形は充電用電圧パターン([+,-,0])の時間を80ms,駆動用のパターン([-,+,-])を20msとした.
恒温恒湿槽内で,温度を26℃に保ち,1ステップの移動距離の湿度による変化を調べた.
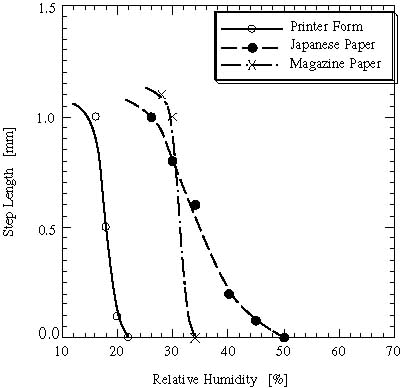
図3にその結果を示す.
移動距離が減り始める湿度は,更紙が30%RHでもっとも高いが,この紙はこれ以上の湿度で移動距離が急激に低下する.
それに比べて和紙は50%RHにおいても,ステップは小さいながらも搬送が可能である.
これは,和紙は更紙に対して軽く柔軟であるため,慣性が小さく,なおかつ電極によく密着して全面に静電気力が働くからである.
プリンタ用紙は20%RH以下で搬送できたが,ほとんど同一の厚さと硬さを有するPPC用紙は15%RHでも搬送できなかった.
これは,PPC用紙に施されている帯電防止処理のためである.
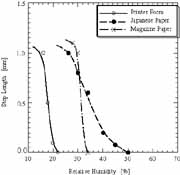 |
| 図3 1ステップあたりの移動距離と湿度の関係 |
次に,図4のように2組の固定子で紙を挟み,両面から駆動して同じ実験を行った.
両面駆動時の紙の通路の高さは,更紙の場合0.2mm,他は0.1mmとした.
上下の電極は位置合わせし,等しい電圧を印加した.
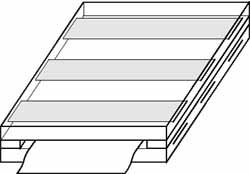 |
| 図4 両面駆動装置 |
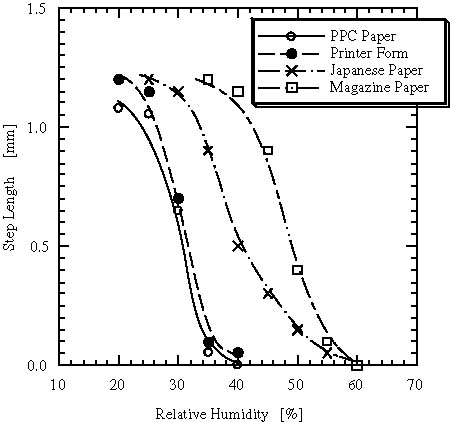
図5に両面駆動の結果を示す.
片側駆動で動いた3種については,ステップ距離-相対湿度の曲線が全体に10%程度高湿度側に移動しており,駆動可能範囲が広がっている.
さらに,片側では搬送できなかったPPC用紙も,プリンタ用紙とほぼ同様に搬送できた.
両面電極でこのような良好な結果が得られたのは,
- 両面から駆動するため駆動力が増す.
- 上下から紙を押さえるので,紙の反りが抑制されて固定子に密着し,全面で力を発生できる.
の2つの理由によるものと考えられる.
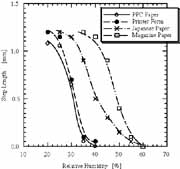 |
| 図5 両面駆動実験の結果 |
特徴
静電紙送り機構の長所を整理すると,以下のようになる.
- 小型化が容易
- 摩擦の小さい紙の搬送が可能
- 極薄の紙の搬送が可能
一方,短所としては,次の点があげられる.
- 搬送力が弱い
- 湿度変化の影響を受けやすい
関連項目
参考文献
[1] S.Egawa, T.Niino, and T.Higuchi, "Film actuators: Planar Electrostatic Surface-Drive Actuators", Proc. 1991 IEEE Workshop on Micro Electro Mechanical Systems, pp. 9-14 (1991)
[2] 新野,柄川,樋口:「静電力による紙送り機構」,精密工学会誌,Vol. 60,No. 12,pp. 1761-1765 (1994)
[3] Y.Tomikawa, T.Nishitsuka, T.Ogawsawara, and T. Takano: "A Paper of Card Forwarding Device Using a Flat-Type Ultrasonic Motor", Sensors and Materials, Vol. 1, No. 6, p. 359- (1989)
[4] 吉田,清水:「超音波モータのカード送り装置への応用」,Tokin Technical Review, 16, p. 36- (1990)
[5] 小田,神谷,岡部:「超音波振動を利用した紙の分離・搬送機構に関する研究(第1報)-開発理念と基礎的実験-」,精密工学会誌,Vol. 58,No. 3,p. 445- (1992)
[6] T.E.Cooprider: "Resistivity Testing Methods for Conductive Base Paper", Tappi, Vol. 51, No. 11, p. 520- (1968)
[7] 松田:「紙の電気特性」,電子写真学会誌,Vol. 28,No. 2, p. 160- (1989)
[8] 坂本:「普通紙タイプ情報用紙」,紙パルプ技術タイムス,昭和63年臨時増刊号,p. 156- (1988)
[9] 坂本:「紙の導電処理」,電子写真,Vol. 14,No. 1,p. 2- (1975)