僷儖僗嬱摦桿摫揹壸宍儌乕僞
乮偙偪傜偺儁乕僕傪嶲徠偟偰偔偩偝偄乯
尨棟
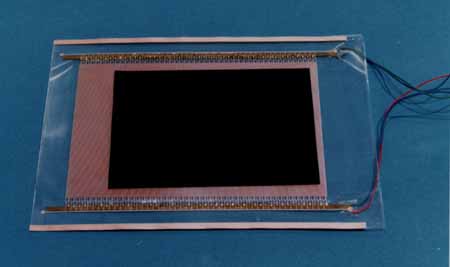
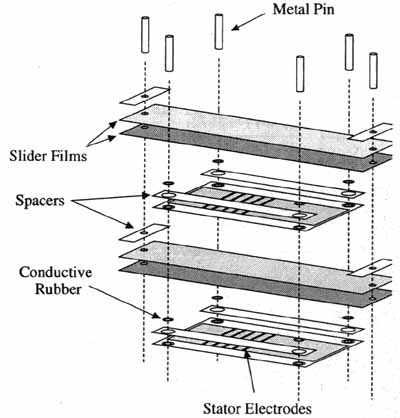
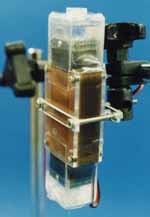
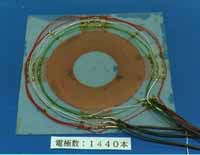
丂恾侾偵僷儖僗嬱摦桿摫揹壸宍惷揹儌乕僞[1]偺帋嶌椺傪帵偡丏
丂杮惷揹儌乕僞偼丆屌掕巕丒堏摦巕偺俀庬偺僼傿儖儉偐傜側傞丏
屌掕巕偼俁憡偵攝慄偝傟偨懡悢偺懷忬偺揹嬌傪帩偪丆昞柺偼愨墢枌偱暍傢傟偰偄傞丏
堦曽丆堏摦巕偼丆旝庛側摫揹惈傪桳偡傞掞峈懱憌傪帩偪丆揹嬌摍偺帟忬偺峔憿偼桳偟偰偄側偄丏
|
 |
| 恾侾丂僷儖僗嬱摦桿摫揹壸宍儌乕僞 |
|
|
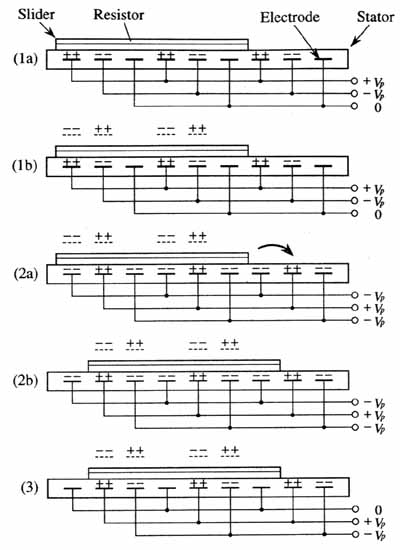
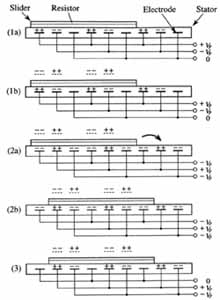
丂恾俀偵嬱摦尨棟傪帵偡丏
嬱摦偡傞嵺偼丆堏摦巕傪屌掕巕偺忋偵抲偒丆(1)弶婜廩揹傪峴偄丆堏摦巕偵揹壸傪拁愊偡傞丆(2)嬱摦偲(3)嵞廩揹傪孞傝曉偟峴偄丆堏摦巕傪僗僥僢僾忬偵嬱摦偡傞丏
- 乮弶婜廩揹乯丂丂嵟弶丆堏摦巕偼揹壸傪帩偨側偄丏傑偢丆恾俀(1a)偵帵偡傛偆偵丆屌掕巕揹嬌偵(+,-,0)偺揹埑傪報壛偟丆堏摦巕忋偵揹嬌偲媡嬌惈偺揹壸傪桿摫偡傞丏
偙傟偵傛傝丆屌掕巕揹嬌偺僷僞乕儞偑丆揹壸偺僷僞乕儞偲偟偰堏摦巕忋偵揮幨偝傟傞丏廩揹偵梫偡傞帪娫偼丆屌掕巕丒堏摦巕娫偺梕検偲掞峈懱憌偺掞峈棪偱掕傑傝丆恾侾偺憰抲偵偍偄偰偼丆侾昩掱搙偱偁傞丏
廩揹偑姰椆偟偨帪揰乮恾俀(1b)乯偵偍偄偰偼丆堏摦巕偼悅捈壓岦偒偵媧堷偝傟丆杸嶤偵傛傝嫮偔曐帩偝傟偰偄傞丏
- 乮嬱摦乯丂丂丂丂恾俀(2a)偺傛偆偵丆揹埑傪(-,+,-)偵愗傝懼偊傞丏偙傟偵傛傝揹嬌偺揹壸偼弖帪偵擖傟懼傢傞偑丆堏摦巕偺揹壸攝抲偑怴偨側暯峵忬懺偵曄壔偡傞偵偼丆弶婜廩揹偲摨偠偔丆偁傞掱搙偺帪娫傪梫偡傞偨傔丆愗傝懼偊捈屻偵偼丆恾俀(2a)偺傛偆側揹壸攝抲偑尰傟傞丏
偙偺偲偒丆堏摦巕偺揹壸偲偦偺捈壓偺揹嬌偺揹壸偼摨晞崋偲側傞偨傔丆堏摦巕偵偼晜忋椡偑摥偔丏偦傟偲摨帪偵丆幬傔壓偺揹嬌偺揹壸偺岠壥偵傛傝丆堏摦巕偵偼塃岦偒偺嬱摦椡偑摥偒丆寢壥偲偟偰丆堏摦巕偼塃懁偵揹嬌侾僺僢僠暘嬱摦偝傟傞乮恾俀(2b)乯丏
- 乮嵞廩揹乯丂丂丂嬱摦拞偵堏摦巕偺揹壸偑幐傢傟傞偨傔丆楢懕偟偰嬱摦偡傞偲丆悇椡偑尭彮偡傞丏偦偙偱丆堏摦巕偑惷巭偟偨忬懺偱丆恾俀(3)偺傛偆偵揹嬌傪侾憡偢傜偟偰惓晧偺揹埑傪報壛偟丆嵞廩揹傪峴偆丏幐傢傟傞揹壸偼慡懱偺堦晹側偺偱丆嵞廩揹偺帪娫偼弶婜廩揹帪娫傛傝傕抁偔偰椙偄丏
偙偺屻丆揹埑傪報壛偡傞揹嬌傪侾憡偢偮偢傜偟丆(2)丆(3)偺僗僥僢僾傪孞傝曉偡偙偲偵傛傝丆楢懕揑側嬱摦傪峴偆丏
|
 |
| 恾俀丂嬱摦尨棟 |
|
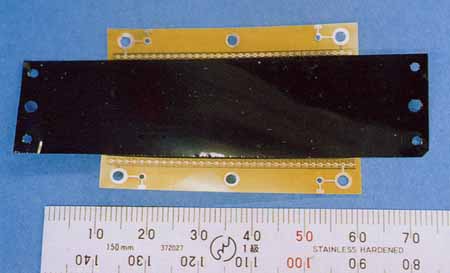
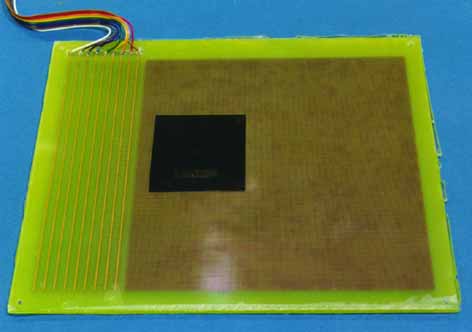
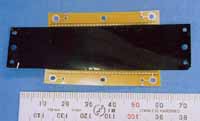
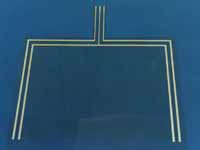
丂屌掕巕揹嬌僺僢僠傪240µm偲偟偨帋嶌椺傪恾俁偵帵偡丏
屌掕巕僼傿儖儉偼丆揹巕夞楬攝慄梡偲偟偰梡偄傜傟偰偄傞僼儗僉僔僽儖僾儕儞僩攝慄乮FPC乯婎斅傪棙梡偟偰惢嶌偟偨丏
傑偨丆堏摦巕僼傿儖儉偼丆岤偝12µm偺PET乮億儕僄僠儗儞僥儗僼僞儔乕僩乯僼傿儖儉傪梡偄丆掞峈懱憌偲偟偰僇乕儃儞僽儔僢僋偲億儕僂儗僞儞偺崿崌暔傪昞柺偵揾晍偟偨丏偙傟偵傛傝昞柺掞峈棪偼栺1014僆乕儉偵挷惍偝傟偰偄傞丏
側偍丆屌掕巕丆堏摦巕偺幙検偼丆偦傟偧傟丆0.32g丆0.03g偱偁傞丏
丂偙偺儌乕僞偵800V偺揹埑傪報壛偟丆堏摦巕偵巺傪庢傝晅偗暘摵傪堷偒忋偘偝偣傞偙偲偱悇椡傪應掕偟偨偲偙傠丆0.1N偺悇椡偑摼傜傟偨丏偨偩偟丆嬱摦偺嵺偵偼丆堏摦巕丒屌掕巕娫偺杸嶤傪掅尭偡傞偨傔丆捈宎10µm偺僈儔僗棻巕傪僼傿儖儉娫偵憓擖偟偨丏傑偨丆嬻婥偺愨墢攋夡偵傛傞僼傿儖儉偺懷揹傪杊偖偨傔丆僼傿儖儉娫偺嬻寗傪僼僢慺宯愨墢惈塼懱乮僷乕僼儖僆儘僇乕儃儞丆彜昳柤丗Fluorinert FC-77 (3M幮)乯偱枮偨偟偨丏
丂側偍丆屌掕巕揹嬌偺懴埑偼800V偱偁傝丆偙傟傪墇偊傞偲僇僶乕僼傿儖儉偺愙拝嵻憌撪偱愨墢攋夡偑婲偙偭偨丏
|
 |
| 恾俁丂240µm揹嬌僺僢僠儌僨儖 |
|
摿挜
丂杮曽幃偺惷揹儌乕僞偼丆埲壓偺摿挜傪桳偡傞丏
- 堏摦巕偼丆揹嬌摍偺帟忬偺峔憿傪帩偨偢丆嬱摦偵昁梫側揹壸僷僞乕儞偼丆廩揹憖嶌偵傛傝屌掕巕偐傜揮幨偝傟傞丏
偙偺偨傔丆揹嬌宍忬偺岆嵎傪庴偗偵偔偔丆惢嶌偵崅偄惛搙偑梫媮偝傟側偄丏
傑偨丆屌掕巕丒堏摦巕娫偺埵抲丒妏搙崌傢偣偑晄梫偱偁傝丆慻棫偑梕堈偱偁傞丏
偨偩偟丆埨掕側崅掞峈嵽椏偑昁梫偲側傞丏
- 嬱摦帪偵丆惷揹斀敪椡偵傛傝杸嶤偑尭彮偡傞偨傔丆儀傾儕儞僌摍偺婡峔偑晄梫偱丆峔憿偑扨弮壔偱偒傞丏
傑偨丆斀懳偵惷巭帪偵偼悅捈媧堷椡偵傛傝杸嶤偑敪惗偟丆嫮偄曐帩椡偑摼傜傟傞丏
- 峔憿偑扨弮偱丆惢嶌丒慻棫偑梕堈偱偁傞偨傔丆懡悢憌偺愊憌壔偵揔偡傞丏
愊憌壔
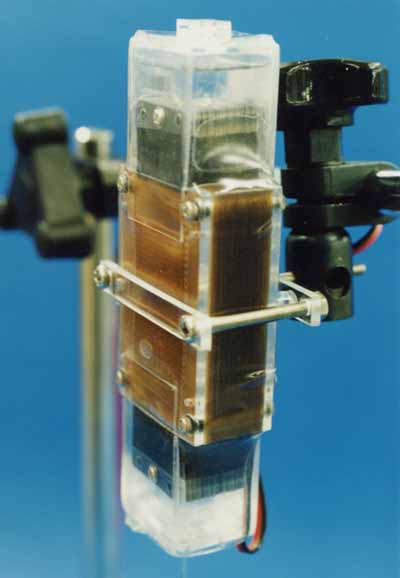
丂忋偱弎傋偨傛偆偵丆杮儌乕僞偼丆愊憌偑梕堈偵峴偊傞偨傔丆懡悢憌偺愊憌偵傛傝丆崅弌椡壔偡傞偙偲偑偱偒傞丏
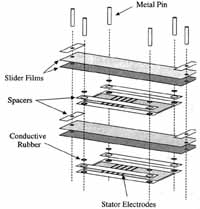
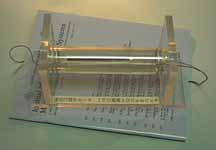
僼傿儖儉儌乕僞傪40慻梡偄偨愊憌宍儌乕僞偺椺傪恾係偵帵偡丏
傑偨丆撪晹偺峔憿傪恾俆偵帵偡丏
屌掕巕丒堏摦巕椉僼傿儖儉偼丆僗儁乕僒傪夘偟偰愊憌偝傟丆抂晹傪屌掕偝傟偰偄傞丏
愊憌僺僢僠偼0.35mm偱偁傞丏
屌掕巕揹嬌偺椉柺傪棙梡偱偒傞傛偆偵丆屌掕巕僼傿儖儉偺娫偵2枃偺堏摦巕僼傿儖儉傪丆掞峈懱柺傪岦偐偄崌傢偣偵憓擖偝傟偰偄傞丏
廬偭偰丆屌掕巕僼傿儖儉40枃偵懳偟丆堏摦巕僼傿儖儉偼80枃偲側傞丏屌掕巕晹偺僺儞偼媼揹慄傪偐偹偰偍傝丆摫揹僑儉惢儚僢僔儍乕傪捠偠偰丆屌掕巕忋偺揹嬌偲愙懕偝傟偰偄傞丏
丂儌乕僞慡懱乮恾係乯偼丆働乕僗偵擖傟丆愨墢塼偵怹偟偰枾晻偟偨丏
悇椡傪揱払偡傞偨傔偵丆堏摦巕椉抂偵屌掕偟偨儚僀儎傪丆僔乕儖傪捠偟偰奜晹偵庢傝弌偟偨丏働乕僗丒愨墢塼傪娷傓廳検偼丆110g偱偁傞丏
| |
恾係丂愊憌儌乕僞
|
|
| |
恾俆丂愊憌儌乕僞偺撪晹峔憿
|
|
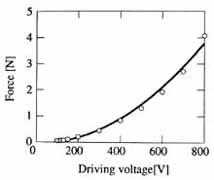
丂偙偺儌乕僞偺悇椡丒僷儚乕傪應掕偟偨寢壥傪埲壓偵帵偡丏
丂恾俇偼丆嬱摦廃攇悢10Hz偱嬱摦偟偨応崌偺丆揹埑偲悇椡偺娭學傪應掕偟偨寢壥偱偁傞丏
報壛揹埑偼丆嵟掅100V偐傜摦嶌偟丆悇椡偼揹埑偺俀忔偵傎傏斾椺偟偨丏報壛偱偒傞揹埑偼丆揹嬌偺愨墢攋夡偵傛傝丆嵟戝800V偵惂尷偝傟偨丏
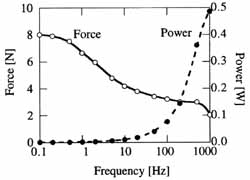
丂恾俈偵丆嬱摦廃攇悢偵懳偡傞悇椡偍傛傃僷儚乕偺曄壔傪帵偡丏嬱摦揹埑偼800V偱偁傞丏
悇椡偼丆廃攇悢偺掅偄応崌偺曽偑嫮偔丆嵟戝8N偑摼傜傟偨丏
僷儚乕偼丆應掕偟偨斖埻偱偼丆廃攇悢偺崅偄応崌偺曽偑嫮偔丆嵟戝0.5W偲側偭偨丏
| |
恾俇丂愊憌儌乕僞偺悇椡
|
|
| |
恾俈丂愊憌儌乕僞偺僷儚乕
|
|
墳梡椺
俀帺桼搙宆儌乕僞[2]丆夞揮宍儌乕僞[3]
丂忋婰偺椺偱偼丆屌掕巕懁揹嬌偼暯峴懷忬揹嬌偲偟偰峔惉偝傟偰偄偨偑丆偦傟偵戙偊偰丆僪僢僩宆揹嬌傗丆曻幩忬揹嬌傪梡偄傞偙偲偵傛傝丆俀帺桼搙宆儌乕僞傗夞揮宆乮僨傿僗僋宆乯儌乕僞偲偡傞偙偲傕壜擻偱偁傞丏
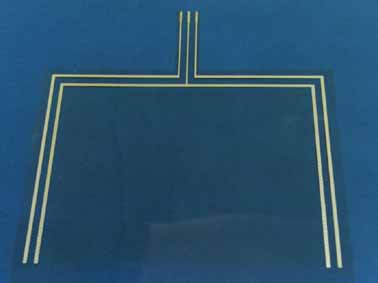
丂恾俉偵俀帺桼搙暯柺宆儌乕僞偺椺傪帵偡丏
偙偺儌乕僞偵偍偄偰偼丆俁亊俁揰傪侾慻偲偟偨俋憡偺僪僢僩忬揹嬌傪梡偄傞丏
恾俀偲摨條偺嬱摦尨棟傪暯柺偵奼挘偟偰梡偄傞偙偲偱丆堏摦巕傪暯柺忋俀帺桼搙偱擟堄偺曽岦傊嬱摦偱偒傞丏
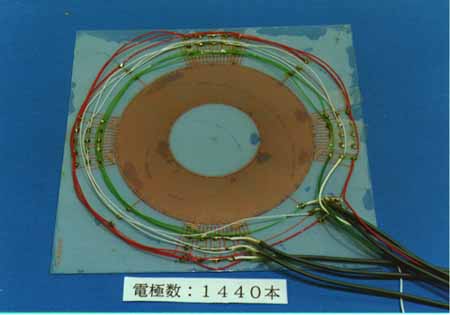
丂恾俋偼丆夞揮宆儌乕僞偱偁傞丏
偙偺儌乕僞偱偼丆暯峴懷忬揹嬌偵戙偊偰丆曻幩忬揹嬌傪梡偄傞偙偲偱堏摦巕傪夞揮偝偣傞偙偲偑偱偒傞丏
恾俋拞偵帵偟偨傕偺偼丆屌掕巕懁偩偗偱偁傞偑丆堏摦巕偲偟偰偼丆擟堄偺宍忬偺傕偺傪梡偄傞偙偲偑偱偒傞丏

| |
恾俉丂俀帺桼搙宆儌乕僞
|
|
| |
恾俋丂夞揮宆乮僨傿僗僋宆乯儌乕僞
|
|
摟柧儌乕僞[4]
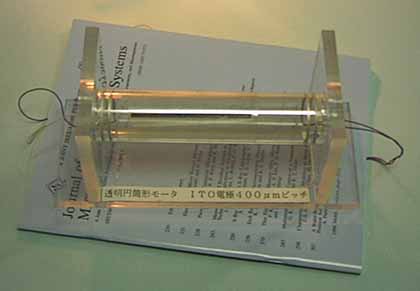
丂塼徎僨傿僗僾儗僀僷僱儖摍偱偼丆揹嬌偲偟偰ITO乮intium tin oxide乯偺敄枌偑巊梡偝傟偰偄傞丏偙偺枌偼丆摟柧摫揹懱偲屇偽傟丆岝傪傎偲傫偳幷傜偢偵揹婥傪揱偊傞偙偲偑偱偒傞丏偙傟傪揹嬌偲偟偰梡偄傞偙偲偱丆摟柧側惷揹儌乕僞傪奐敪偟偨丏幨恀傪恾侾侽偵帵偡丏
丂屌掕巕偼丆125µm偺PET僼傿儖儉偵25nm偺ITO敄枌偑忲拝偝傟偨嵽椏傪巊梡偟偨丏ITO枌偵400µm僺僢僠偺揹嬌傪僄僢僠儞僌偵傛傝宍惉偟偨丏廃曈晹偵尒偊傞攝慄偼丆嬧儁乕僗僩偵傛傝宍惉偟偨媼揹慄偱偁傞丏
傑偨丆堏摦巕偼丆忋婰偺椺偱偼崟怓偱偁偭偨偑丆偙偙偱偼丆墫壔價僯乕儖庽帀傪梡偄偰摟柧壔偟偨丏
丂摟柧僼傿儖儉儌乕僞傪摟柧側庽帀僷僀僾偵姫偒晅偗偰丆墌摏忬偺夞揮儌乕僞偲偟偰峔惉偟偨椺傪恾侾侾偵帵偡丏
| |
恾侾侽丂摟柧儌乕僞
|
|
| |
恾侾侾丂墌摏宆摟柧儌乕僞
|
|
巻憲傝婡峔[5]
丂僷儖僗嬱摦桿摫揹壸宍惷揹儌乕僞偼丆昞柺掞峈棪偑1013乣1015僆乕儉乛仩偺嵽椏傪丆堏摦巕偲偟偰嬱摦偱偒傞丏
巻偺掞峈棪偼丆巻偺庬椶偵傛傝堎側傝丆傑偨幖搙偵傛傝戝偒偔曄壔偡傞偑丆懡偔偺巻偼丆幖搙偑掅偄偲偒偵掞峈棪偑偙偺斖埻偵擖傞丏
偦偺偨傔丆巻傪儌乕僞偺堏摦巕偲偟偰摦偐偡偙偲偑偱偒傞丏
偙傟傪梡偄傟偽丆儘乕儔摍傪梡偄偢偵捈愙偵巻偵椡傪梌偊傞僐儞僷僋僩側巻憲傝婡峔偑幚尰偱偒傞丏
娭楢崁栚
嶲峫暥專
[1]S.Egawa, T.Niino, and T.Higuchi, "Film actuators: Planar Electrostatic Surface-Drive Actuators", Proc. 1991 IEEE Workshop on Micro Electro Mechanical Systems, pp. 9-14 (1991)
[2]旙岥丆暱愳丆怴栰丆惣岥丆乽暯柺俀帺桼搙惷揹傾僋僠儏僄乕僞偺帋嶌乿丆1992擭搙惛枾岺妛夛弔婫戝夛妛弍島墘夛島墘榑暥廤丆pp. 329-330 (1992)
[3]怴栰丆暱愳丆旙岥丆惣岥丆乽僨傿僗僋宍惷揹僼傿儖儉儌乕僞偺帋嶌乿丆擔杮婡夿妛夛儘儃僥傿僋僗儊僇僩儘僯僋僗島墘夛'91島墘榑暥廤丆Vol. B丆pp.165-166 (1991)
[4]崱栰丆崅揷丆崌揷丆怴栰丆暱愳丆旙岥丆乽摟柧僼傿儖儉儌乕僞偺奐敪乿丆擔杮婡夿妛夛儘儃僥傿僋僗儊僇僩儘僯僋僗島墘夛'91島墘榑暥廤丆Vol. A丆pp.73-74 (1991)
[5]怴栰丆暱愳丆旙岥丆乽惷揹椡偵傛傞巻憲傝婡峔乿丆惛枾岺妛夛帍丆Vol. 60丆No. 12丆pp. 1761-1765 (1994)