弾性表面波リニアモータ
キーワード:弾性表面波,超音波モータ,リニアモータ,レイリー波,圧電トランスデューサ,シリコンスライダ
はじめに
これまでに、10MHz駆動の弾性表面波リニアモータ(surface acoustic wave linear motor:SAWリニアモータ)について、その優れた可能性が報告されている[1][2]。
SAWモータは、出力3.5N[1]、速度1.0 m/s 以上[2]、数十nmでの位置決めの可能性[1][2]、cmオーダーのストローク、高エネルギ密度、ステータトランスデューサの簡便な保持、といった長所を持つ。
ステータトランスデューサの小型化には、高い周波数を用いればよく、たとえば、5倍の50MHzの駆動周波数を用いれば、ステータトランスデューサの幅と厚みはそれぞれ1/5とする事ができる。
駆動原理
|
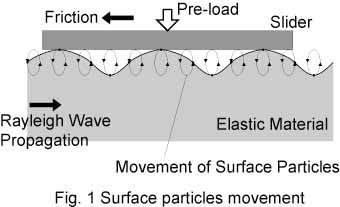
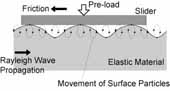
弾性表面波の1種であるレイリー波が弾性体表面を伝搬すると弾性体表面付近の粒子は図1に示すように楕円運動をする。
この表面にスライダを押しつけると、粒子の楕円運動が摩擦を介してスライダに伝達され、同図に示すようにレイリー波の伝搬方向と逆方向にスライダが駆動される。
また、十分な摩擦力を得るためにスライダには予圧があたえられている。
|
| |
図1 表面付近の粒子の運動
|
|
|
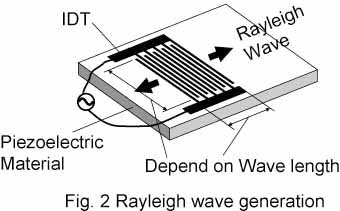
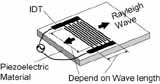
本研究では弾性表面波としてレイリー波を用い、ステータトランスデューサ兼弾性体媒体として圧電材料である128o Y-cut LiNbO3 基板を用いている。
この圧電基板表面に図2に示すような交差指電極(または「くし型電極」、interdigital transducer:IDT)を配置し、交流電圧を印可すると、レイリー波が励振され、同図中の→(矢印)で示される方向に伝搬していく。
|
| |
図2 交差指電極によるレイリー波の発生
|
|
|
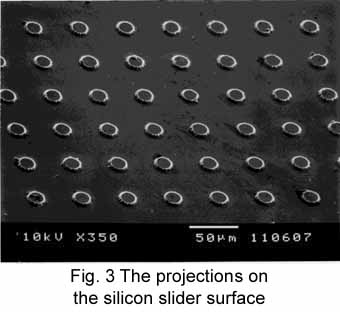
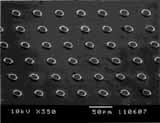
スライダはシリコンでできており、表面には直径が数十µm程度、高さが1µmの突起が分布している。
その表面のSEM写真を図3に示す。
|
| |
図3 シリコンスライダ表面の様子
|
|
10 MHz モータ
|
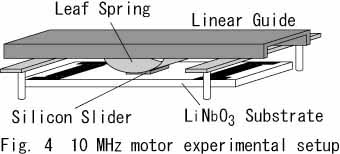
10MHz SAWモータのステータトランスデューサのサイズは15 x 60 x 1 mm3であり、駆動周波数はIDTの共振周波数の9.6 MHzである。
尚、共振周波数はIDTの電極の周期長によって決定される。
シリコンスライダのサイズは4 x 4 x 0.3 mm3である。
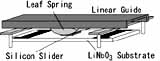
図4にリニアモータの構成を示す。シリコンスライダは板バネによって、30 N程度の予圧が与えられている。
|
| |
図4 10MHzモータの構成
|
|
|
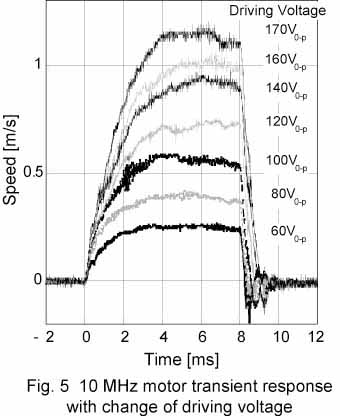
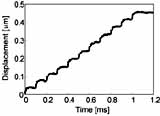
図5は10 MHzモータの印加電圧を60 V0-pから170 V0-pまで変化させたときの過渡応答特性を表している。
印加電圧が170 V0-pの時に定常速度が1.1 m/sに達していることがわかる。
このときの立ち上がりの加速度とスライダ自重より、推力が3.5 Nに達していることがわかった。
また、このモータの応答周波数は130 kHz以上である。
|

| |
図5 10MHzモータの過渡応答特性
|
|
|
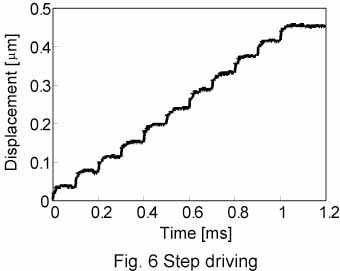
10 MHzモータについて、ステップ駆動実験を行った。印加電圧を80 V0-pとし、高周波を30波印加して、スライダの変位をレーザドップラ振動計で観察した。
図6はその変位を示している。スライダが約40 nmステップで変位していることがわかる。
|
| |
図6 ステップ駆動
|
|
SAWモータの小型化のしくみ
|
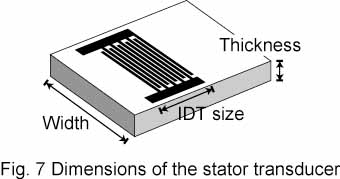
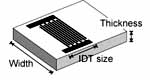
図7に示すステータトランスデューサの幅や厚みといったサイズは、一様なレイリー波を得るためには最低限必要とされるサイズがあり、波長に比例している。
公差指電極の幅には約30波長、基板の厚みには約2波長それぞれ必要とされている。
ゆえに、もし、5倍の駆動周波数を用いるとステータトランスデューサの幅は3 mm程度、厚みは0.2 mm程度とする事ができる。
|
| |
図7 ステータトランスデューサの寸法
|
|
ここで、駆動周波数を高めることで、無限に小型化できそうに思われるが、一つの問題が生じてくる。
10 MHzステータトランスデューサについて、レイリー波伝搬中での弾性体媒体表面における楕円運動の振動速度の水平成分が1 m/sのとき、楕円運動の鉛直方向の振動振幅は約20 nmである。
ここで、駆動周波数を5倍に高めると振動振幅は1/5の4 nm程度になってしまう。一方、本研究で用いている圧電材料基板の表面粗さは(Ra=)5 nmであり、振動振幅と同等となってしまい、表面粗さのスライダ駆動に対する影響が懸念される。
試作に先立ち、等価回路モデルを用いて小型SAWモータの性能の見積もりを行った。
10 MHzトランスデューサにおける、印加電圧と表面の振動速度の関係をもとにすると、駆動周波数50 MHzにおいて印加電圧を60 V0-pとした場合、表面粒子の振動速度の水平成分は、約1 m/sとなる。
等価回路モデルによる見積もりを行ったのは、周波数の高さ故に振動を直接観察する事ができないからである。
10 MHzにおいて、表面の振動速度が1.0 m/sのとき、スライダ速度はその80 %の0.8 m/sであった。
よって、50 MHzモータにおいて、印加電圧を60 V0-pとしたときにはスライダ速度0.8 m/sを見込むことができる。一方、推力に関しては10 MHzにおいて、予圧の17 %程度の推力を得ている。
50 MHzモータはリニアガイドを持たないため、予圧の17 %である22 mNより大きな推力が期待できる。
小型SAWリニアモータ
|
試作した小型化ステータトランスデューサを図8に示す。
サイズは5 x 50 x 0.5 mm3となり、10 MHzモータに比べて体積が1/7になった。
共振周波数は49.76 MHzである。
|

| |
図8 小型化したステータトランスデューサ
|
|
|
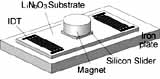
図9に小型SAWリニアモータの構成を示す。
ステータトランスデューサは鉄板の上に配置されており、シリコンスライダは永久磁石に接着されている。
鉄板と永久磁石の間で働く吸引力によってスライダ予圧を得ている。
尚、この構成は実験のための構成であり、小型SAWリニアモータを実用化するにあたってはより適切な予圧機構を採用する予定である。
|
| |
図9 小型SAWリニアモータの構成
|
|
|
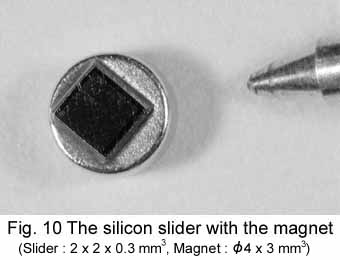
シリコンスライダを図10に示す。
シリコンスライダの大きさは2 x 2 x 0.3 mm3、永久磁石の大きさはでφ4 x 3 mm3あり、スライダの総重量は0.18 gであった。
スライダに働く重力、及び、磁石の吸引力によるスライダ予圧は0.13 Nとなった。
|

| |
図10 シリコンスライダ
|
|
|
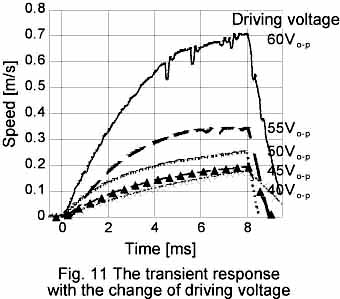
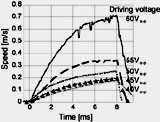
小型SAWリニアモータについて、印加電圧を40から60 V0-pまで変化させて、8ミリ秒間駆動させてスライダの変位をレーザドップラ振動計で観察した。
図11に小型SAWモータの過渡応答特性を示す。
印加電圧が60 V0-pの時に、定常速度0.7 m/sに達していることがわかる。これは、推定振動速度の水平成分の70 %であった。同応答曲線より、スライダ加速度200 m/s2を得ていることがわかる。これより推力を計算すると0.036 Nとなり、予圧の28 %にあたる。小型SAWモータにおいて、予圧に対する推力の割合が改善されたのはリニアガイドを持たないためと思われる。
|
| |
図11 小型SAWモータの過渡応答特性
|
|
まとめ
これまでのところ、駆動周波数を10 MHzとしたSAWリニアモータにおいて、推力3.5 N、定常速度1.1 m/sを得ている。
SAWリニアモータは駆動周波数を高めることで用意に小型化する事ができ、50 MHzにおける駆動に成功している。
小型モータにおいて、定常速度0.7 m/s、推力0.036 Nを得た。
今後
小型SAWモータについては駆動に成功したばかりであり、スライダ形状や予圧の最適化など、課題が多く残されている。
今後、スライダの接触状態を把握し、最適な接触条件を求め、小型SAWリニアモータの性能を高めていく。
また、10 MHzモータに置いても同様の最適接触状態を把握し、小型モータとの比較を行い、小型化の限界やステータトランスデューサの表面粗さの影響などを検討していく。
また、エネルギ循環手法[3]を取り入れ、数Vといった低電圧で駆動できるマイクロSAWリニアモータの可能性を探っていく。
参考文献
[1] N. Osakabe, M. Kurosawa, T. Higuchi and O. Shinoura, "Surface acoustic wave linear motor using silicon slider", Proc. of IEEE Workshop on Micro Electro Mechanical Systems, Heidelberg, Jan. 25-29, 1998
[2] 黒澤,刑部,東條,高崎,樋口:「シリコンスライダを用いた弾性表面波モータ」,信学技報,pp.55-62, 1998
[3] 東條,黒澤,樋口:「エネルギー循環型弾性表面波モータ」,第10回電磁力関連のダイナミクスシンポジウム,pp.505-508, 1998