|

|
|
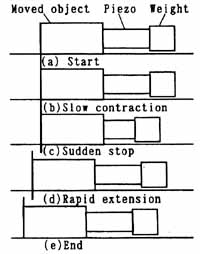
| (Moving toward left) | (Voltage Waveforms) | |
| Figure 1: Operation Principle | ||
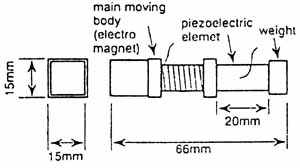
The mechanism is able to control the minute motion of several nanometer and at the same time has virtually unlimited movable range. The mechanism can be extended to multiple degree-of-freedom systems with multiple actuators and counter weights. The IDM is considered to be a suitable mechanism for micro systems since its construction is quite simple.
The mechanism generates impulsive force when moving. We have utilized such impulsive force to develope a printed board positioning device, a centering system for workpieces on rotating supports, and a piezo-electric maicro manipulator.
The processes of the motion are described as follows:
(a) The cycle starts with the actuator in extended state.
(b) The actuator makes slow contraction so that the inertial force caused by the contraction should not exceed the static friction.
The main body keeps the position.
(c) At the end of contraction process, a sudden stop of the motion is made to small move the main body.
(d) Then, a rapid expansion of the actuator causes impulsive inertial force, which results in the step-like motion of the main body.
Making slow extension and rapid contraction can carry out motion toward the other direction.
The motion amplitude of the actuator can control the step size of the motion.
Repeating those processes through (a)-(d) a long distance motion is made possible.
|
|
|
|
| (Moving toward left) | (Voltage Waveforms) | |
| Figure 1: Operation Principle | ||
Fig. 3 shows a nanometer-scale continuous step motion. The size of the steps is about 4nm. Controlling voltage amplitude applied to the piezoelectric actuator, nanometer motion can be controlled. The maximum load capacity of the Impact Drive Mechanism depends on the static friction. If the static friction is large enough, the Impact Drive Mechanism can climb up the vertical surface.
|
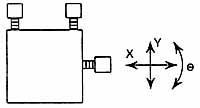
| Figure 2: Basic 1-DOF setup |
|
| Figure 3: Motion of IDM (nano-meter motion) |
|
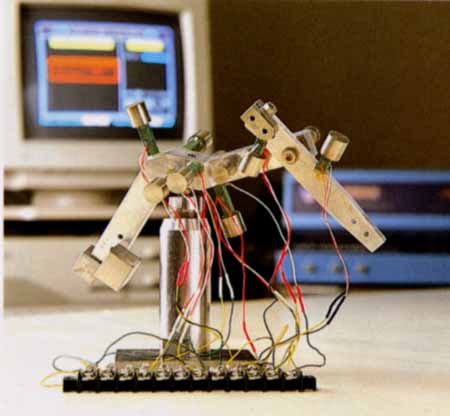
| Figure 4: Multi-DOF mechanism |
|
| Figure 5: Micro robotic arm |
[2] Y.Yamagata, T.Higuchi, H.Saeki, and H.Ishimaru: "Ultrahigh Vacuum Precise Positioning Device Utilizing Rapid Deformations of Piezoelectric Elements", Journal of Vacuum Science and Technology, A, Vol. 8, No. 6 Nov./Dec., pp. 4098-4100 (1990)
[3] T.Higuchi, Y.Yamagata, K.Kudoh, K.Iwasaki: "Micro Robot Arm Utilizing Rapid Deformations of Piezoelectric Elements", Proc. 5th International Symposium on Robotics Research, The MIT Pres, Aug., pp. 441-445 (1989)
[4] Yutaka Yamagata and Toshiro Higuchi, "A Micropositioning Device for Precision Automatic Assembly using Impact Force of Piezoelectric Elements", Proceedings of the IEEE International Conference on Robotics and Automation, pp. 666-671 (1995)
[5] K.Kudoh,T.Goto,K.Sato,Y.Yamagata,K.Furutani,T.Higuchi "Development of Piezo Micromanipulator fr cell Micromanipulation" J.Mamm. Ova. Res. (Japanese), Vol.7, No.1, pp. 7-12 (1990)