A 3 DOF Hanging Type Magnetic Levitation System
with Permanent Magnet Motion Control
Using Piezoelectric Actuator
Keywords: Magnetic Levitation, Piezoelectric Actuator, Permanent Magnet
Abstract
A type of magnetic levitation system with permanent magnet motion control has been already proposed. The feature is to control attractive force of permanent magnet using actuator. Based on this principle, a 1 DOF hanging type magnetic levitation system has been developed. The levitated object hangs from the upper ferromagnetic ceiling. This system had problem that the levitated object swings. Next step is development of a 3 DOF magnetic levitation system. A 3 DOF magnetic levitation system that can control the DOFs of the rotation about horizontal axes is developed. This paper describes the success of a 3 DOF magnetic levitation system using permanent magnets and piezoelectric actuators.
INTRODUCTION
The need for a very clean environment is increasing in such areas as semiconductor processing and biotechnological experiments. During conveyance and handling of an object, dust and particles are generated from contact points. The conveyance vehicles used in these areas must eliminate contamination. Thus mechanical contacts are the prime origins of dust and particle generation. A non-contact conveyance mechanism is good solution for clean environment applications.
Most of magnetic levitation system is a type of system which controls attractive force of electromagnet by varying electric current. Also, a type of magnetic levitation system which controls attractive force of permanent magnet by varying air gap length has been already proposed[1,2]. The feature of this system is the use of permanent magnets and actuators. The principle of this system is to adjust attractive force with permanent magnet motion control using actuator. The merit of this system is that it eliminates problematic heat generation as compared with electromagnet and is effective for saving energy.
Based on this principle, a 1 DOF hanging type magnetic levitation system for a conveyance system has been proposed[1]. Permanent magnet, actuator, and sensor have been installed on the levitated object. This hanging type of magnetic levitation system is very suitable for a conveyance system. The conveyance pass is easily constructed by setting up the ceiling of ferromagnetic materials. In this system, however, the actuator must drive the weight of itself, so the selection of actuator is very important. The experimental examination of a 1 DOF magnetic levitation system was carried out to verify that the object could be levitated. The results showed that the levitated object was swinging. Next step is development of a 3 DOF magnetic levitation system. A 3 DOF magnetic levitation system, which can control the DOFs of the rotation about two horizontal axes, is developed. Three actuators and three magnets, which are arranged to be a regular triangle, are installed on the levitated object.
This paper describes a 3 DOF magnetic levitation system using permanent magnets and piezoelectric actuators. First, the principle of the proposed hanging type magnetic levitation mechanism is explained. Secondly, a 3 DOF magnetic levitation system is introduced. Finally, some experimental examinations are carried out.
PRINCIPLE OF HANGING TYPE MAGNETIC LEVITATION MECHANISM WITH PERMANENT MAGNET MOTION CONTROL
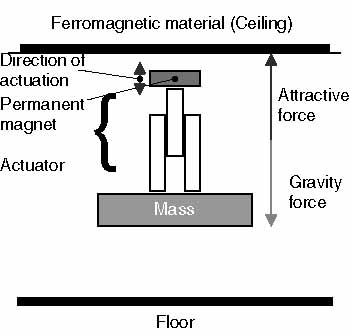
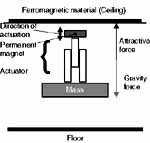
An outline of one typical proposed magnetic levitation mechanism is shown in figure 1. A levitated object is made of a permanent magnet, an actuator, and a mass. The actuator makes the length between a permanent magnet and a mass longer or shorter. This levitated object is hanged from the ferromagnetic ceiling by the attractive force of permanent magnet. The direction of levitation is vertical, and the magnet and the object move only in this direction. The equilibrium position is balanced by the gravity force of an object and the attractive force of magnet.
|
|
Figure 1: Outline of Proposed Hanging Type Magnetic Levitation Mechanism
|
When the actuator is not actively controlled, the levitated object will either fall or adhere to the ceiling. The control of actuator makes this system stable. Because there is a smaller attractive force for a larger air gap between the permanent magnet and the ceiling, the actuator drives its length shorter in response to object movement from its equilibrium position towards the ceiling. Similarly, the actuator drives its length longer in response to object movement away from the ceiling. In this way, the object can be stable suspended without mechanical contact.
EXPERIMENTAL SETUP
Piezoelectric Actuator with Displacement Extension Mechanism
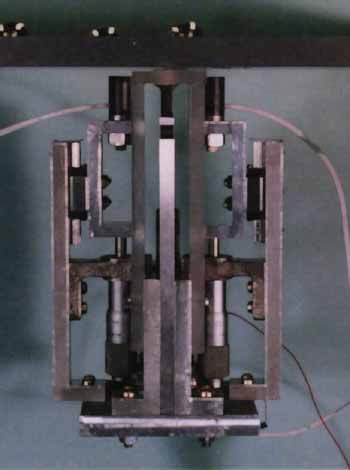
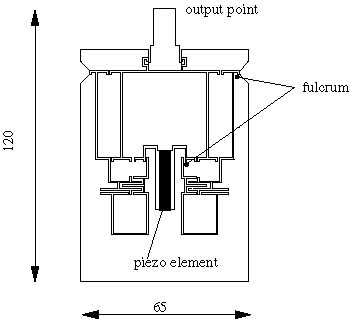
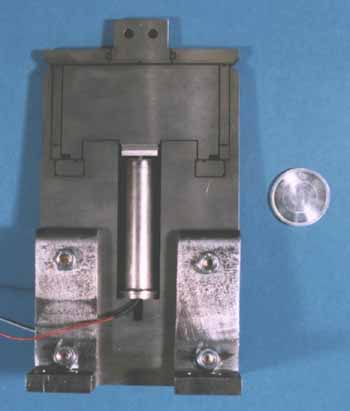
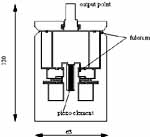
Because the proposed magnetic levitation system has an actuator on the levitated object, the actuator needs not only force for driving itself but also force for supporting itself. Piezoelectric element has the advantages that they are small, light, and the generating force is strong, however, it has the disadvantage that displacement range is small. To compensate for this weak point, the displacement is magnified with leverage. The piezoelectric actuator with displacement extension mechanism is shown in figure 2.
|

|
|
Figure 2: Schematic Diagram of Piezoelectric Actuator with Displacement Extension Mechanism
|
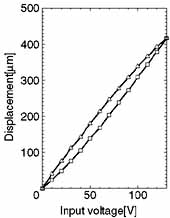
The relation of input voltage and displacement was examined as a basic characteristic and is shown in figure 3. A little hysteresis can be seen, but it may be not a problem to make the magnetic levitation system stable.
|
|
Figure 3: Relationship between Input Voltage and Displcement
|
The maximum values obtained by experiment are 420[µm] displacement and 10[N] force at 130[V] input voltage, 0.265[kg] mass, 58.23[kN/m] spring constant, 0.526[Ns/m] damping constant, 0.218[N/V] force constant, 120[mm] height, and 5[mm] thickness.
3 DOF Hanging Type Magnetic Levitation System
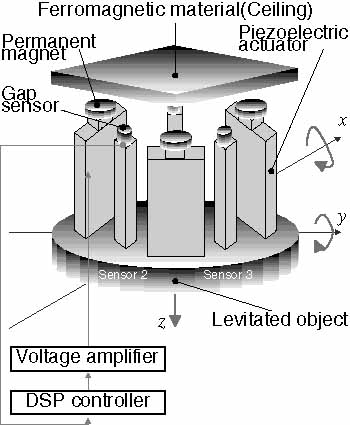
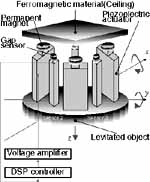
To prove the feasibility of the proposed magnetic levitation system, a 1 DOF hanging type magnetic levitation system was constructed. The 1 DOF levitation system has the problem that the object swings. Next step is development of a 3 DOF magnetic levitation system. A 3 DOF levitation system, which can control the DOFs of the rotation about two horizontal axes, is free of this problem. The schematic diagram of 3 DOF hanging type magnetic levitation system is illustrated in figure 4. Three actuators, three permanent magnets, and three displacement sensors are installed on the levitated object. Three permanent magnets are located on the axes above an actuator. They are arranged to be a regular triangle. The levitated object is hanged from the ferromagnetic ceiling.
|
|
Figure 4: Schematic Diagram of 3 DOF Hanging Type Magnetic Levitation System
|
The system uses a DSP controller. The sensor signals are inputted into the controller, which computes the forces required to keep the object in levitation. The forces are converted to voltages. The voltages are outputted to voltage amplifiers, which generate the voltage outputs to the piezoelectric actuators that control the length of the air gaps between the permanent magnets and the ceiling. The DSP controller has three independent PD feedback loops.
Mass of the levitated object is 2.037[kg]. A piezoelectric actuator is employed as the actuator of the permanent magnets. A 60[V] offset voltage is added to the input signal of the actuator. The permanent magnet is a cylinder 10[mm] diameter and 5[mm] height, with its magnetic poles aligned in the vertical direction. The material is Nd-Fe-B with a flux density 0.35[T]. 3 DOF of the levitated object are sensed by 3 eddy current gap sensors installed on the object. A resolution and a measuring range of the displacement sensor are 1[µm] and 4[mm] respectively. The material of ceiling is steel with 0.35[%] carbon.
EXPERIMENTAL EXAMINATION
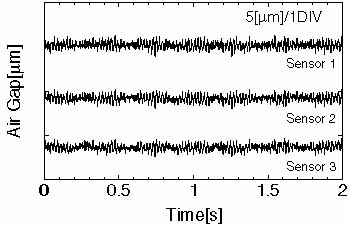
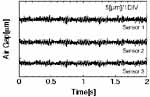
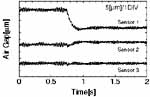
Levitation examination of the system was carried out to verify that the object could be levitated. Sensor output signals during levitation were recorded and are shown in figure 5. In the figure, the sensor output signals are averages of two displacement sensors that are both sides of an actuator.
The air gap between the object and ceiling was 2.4[mm] during the object was levitating. The resolution of displacement sensor is 1[µm]. As shown in the figure, the object levitated as good as the sensor resolution.
|
|
Figure 5: Sensor Output Signals during Levitation
|
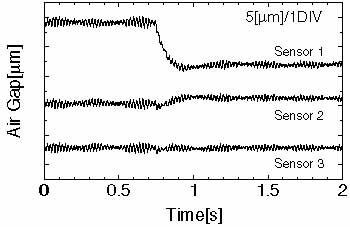
Next, a 10[V] step input was added to the input voltage of actuator 1 with the results shown in figure 6. In the figure, we found that the step input for an actuator mainly causes the variation of the output of only sensor 1. It means that if permanent magnets and sensors were arranged symmetrically, it is possible to avoid the mutual interference between subsystems. When the step input is applied, the object goes up. It means that the object rotates around horizontal axis.
|
|
Figure 6: Step Response When External Disturbance is Added
|
These experimental results verify that this 3 DOF magnetic levitation system can control the DOFs of the rotation about two horizontal axes.
CONCLUSION
A 3 DOF hanging type magnetic levitation system with permanent magnet motion control was introduced. The purpose of this magnetic levitation system is making non-contact conveyance system. The principle of proposed levitation system was explained. Based on this principle, a 3 DOF experimental setup was developed. Experimental setup could control the DOFs of the rotation about two horizontal axes. The levitation accuracy was 2[µm]. The levitated object of 3 DOF magnetic levitation system did not swing as compared with 1 DOF magnetic levitation system.
In further work, centralized control strategy will be performed. This strategy controls the voltage to an actuator based on all the three sensor output signals. The merit is high stiffness of the rotational movement for stable conveyance.
REFERENCE
[1] Koichi OKA, Toshiro HIGUCHI, and Takuya SHIRAISHI, "Hanging Type Mag-Lev System with Permanent Magnet Motion Control," Proceedings of the Sixth International Symposium on Magnetic Bearings, pp. 162-171, August 1998.
[3] Koichi OKA and Toshiro HIGUCHI, "Magnetic Suspension System with Permanent Magnet Motion Control," Proceedings Fourth International Symposium on Magnetic Bearings, pp. 131-137, August 1994.